
Introduction to Linear Algebra
Systems of Linear Equations
- Introduction
- Linear systems
- Vectors
- Linear combinations
- Matrices
- Planes in ℝ³
- Reduced Row-Echelon Form
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Linear transformations
- Affine maps
- Exercises
- Answers
Matrix Algebra
- Introduction
- Manipulation of matrices
- Partitioned matrices
- Block matrices
- Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Equivalent matrices
- Elimination: A = L U
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Vector Spaces
- Introduction
- Motivation
- Vector spaces
- Bases
- Dimension
- Coordinate systems
- Linear transformations
- Change of basis
- Matrix transformations
- Compositions
- Isomorphisms
- Dual transformations
- Quotient spaces
- Wedge products
- Rotors
Eigenvalues, Eigenvectors
- Introduction
- Characteristic polynomials
- Companion matrix
- Algebraic and geometric multiplicities
- Minimal polynomials
- Eigenspaces
- Where are eigenvalues?
- Eigenvalues of A B and B A
- Generalized eigenvectors
- Similarity
- Diagonalizability
- Self-adjoint operators
- Exercises
- Answers
Euclidean Spaces
- Introduction
- Euclidean space
- Bilinear transformations
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Examples of transformations
- Orthogonality
- Gram--Schmidt Process
- Orthogonal matrices
- Self-adjoint matrices
- Unitary matrices
- Projection operators
- QR-decomposition
- Least Square Approximation
- Quadratic forms
- Exercises
- Answers
Canonical forms
- Introduction
- 2D decomposition
- 3D decomposition
- Projectors
- Direct-sum decompositions
- Cyclic decompositions
- Symmetric matrices
- Symmetric matrices
- Pseudoinverse
- URV-decomposition
- LU-decomposition
- QR-decomposition
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- CUR decomposition
- Exercises
- Answers
Applications
- Introduction
- Circles along curves
- TNB frames
- GPS problem
- Coriolis acceleration
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- FSA
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
- Answers
Miscellany
- Introduction
- Circles along curves
- TNB frames
- Differential forms
- Calculus
- Vector representations
- Matrix representations
- Change of basis
- Orthonormal Diagonalization
- Generalized inverse
- Differential forms
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves Systems of Linear Equations
- Location of Eigenvalues
- Power Method
- Iterative Method
- Similarity and Diagonalization
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
Linear Systems
Linear algebra is the study of linear sets of equations and their transformation properties. Linear algebra is central to almost all areas of mathematics.A linear equation in the variables x₁, x₂, … , xn is an equation of the form
Observe that a linear equation does not involve products or roots of variable or any nonlinear function of these variables. All variables occur only to the first power and do not appear as their products.
Two equations with two unknowns
Let us start with a system of two linear equations with two unknowns, such as
However, we can save 3 multiplications on expense of 1 division if we multiply the first row by 3/2 (a computer does not afraid of using rational numbers, &Qopf'). This yields 8 flops (arithmetic operations) to solve the given linear system.
Do you know another option to solve this system of linear equations? Most likely you were taught that substitution will work. Indeed, expressing x from the first equation (with 3 arithmetic operations: 1 subtraction and 2 divisions), we obtain
Another option to find the solution is to plot each equation and determine the intersection (if any). Maxima helps

Since every linear equation in two unknowns x and y
Plot[{3*x/2 - 1/2, 3*x/2 - 1/2}, {x, -0.2, 2}, PlotStyle -> {{Thickness[0.03], Orange}, {Thickness[0.005], Blue}}]
|
|
A linear equation in the variables x₁, x₂, … , xn is an equation of the form
Observe that a linear equation does not involve products or roots of variable or any nonlinear function of these
variables. All variables occur only to the first power and do not appear as their products.
Finally, you need to solve this system of four equations in four unknowns, x, y, z, and w. Of course, Mathematica knows how to accomplish this task, what about you? ■
In general, we claim that a linear system of two equations with two unknowns either has a unique solution, or no solution, or infinitely many solutions.
Systems with three unknowns
Now we turn our attention to three linear equations in three unknowns:
|
We can plot one plane using the equation of the plane that passes through a given point (x₀, y₀, z₀):
\[
a\,x + b\,y + c\,z = a\,x_0 + b\,y_0 + c\, z_0 ,
\]
and having normal vector (𝑎, b, c).
|

|
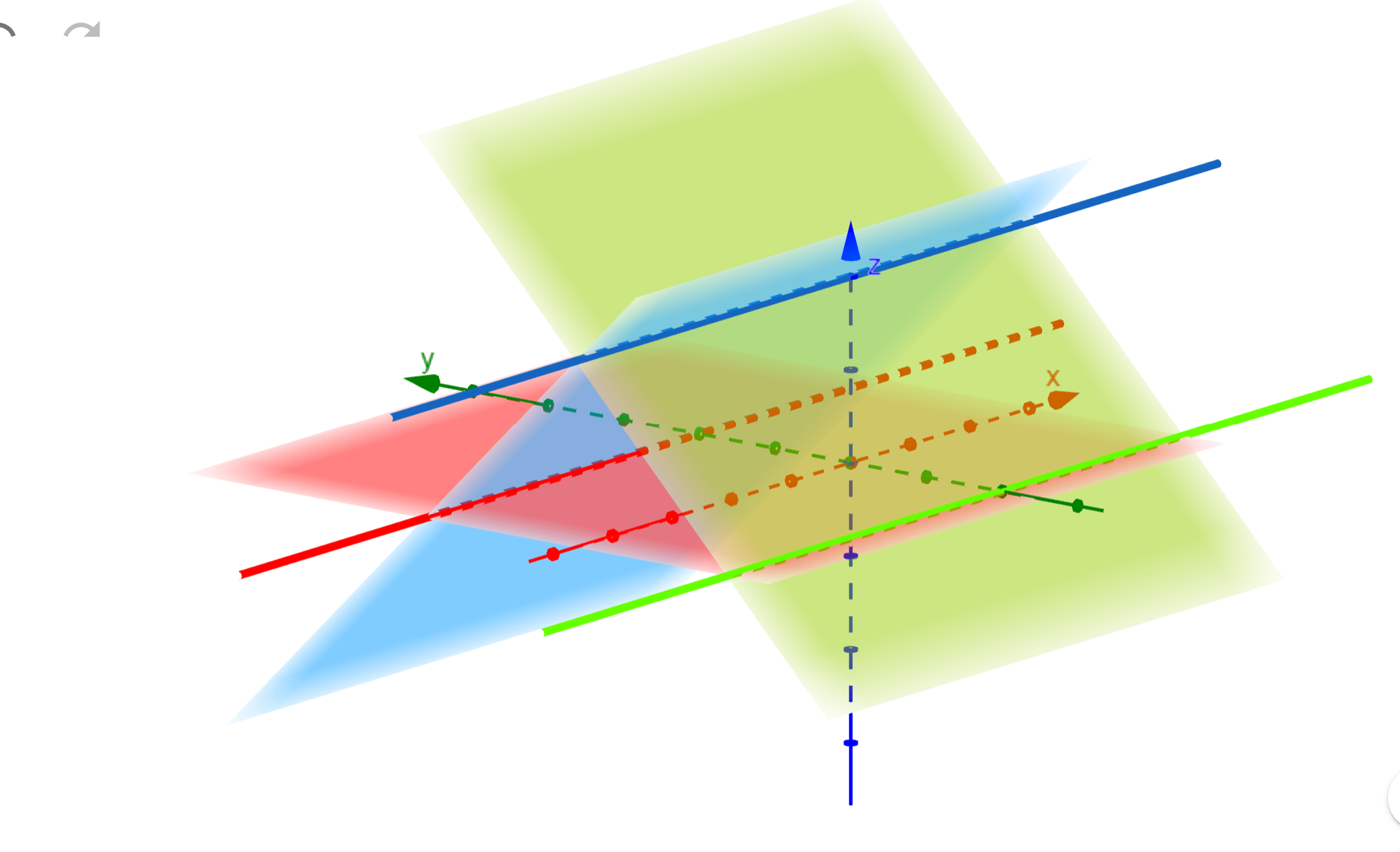
Case 1 (intersection in three lines):
Consider the linear system of equations:

|
Maxima code for plotting intersection of planes (𝑎) and (b)
|
|
Our nest figure shows intersection of two planes defined by equations (𝑎) and (c); it is clearly a line that is parallel to the line of the previous figure.
|

|

|
Maxima code for plotting intersection of planes (b) and (c), which is parallel to two previous lines because it lies on the plane y = 0.
Plot3D[{10 - 10*y}, {x, -2, 2}, {y, -2, 2},
Axes -> False, Boxed -> False]
|
Next figure shows that there is no solution. If we substitute z = 0 (from the first equation) into Finally, we plot all the lines of intersection using GeoGebra that helps us to visualize these three lines.

|
|
Case 2 (two planes coincide and parallel to the third):

|
Next figure shows that there is no solution when two coincident planes parallel to the third one; no common
intersection.
|
|
Case 3 (three parallel planes> This graph shows the case of no solution because three parallel planes have no common intersection. |

|
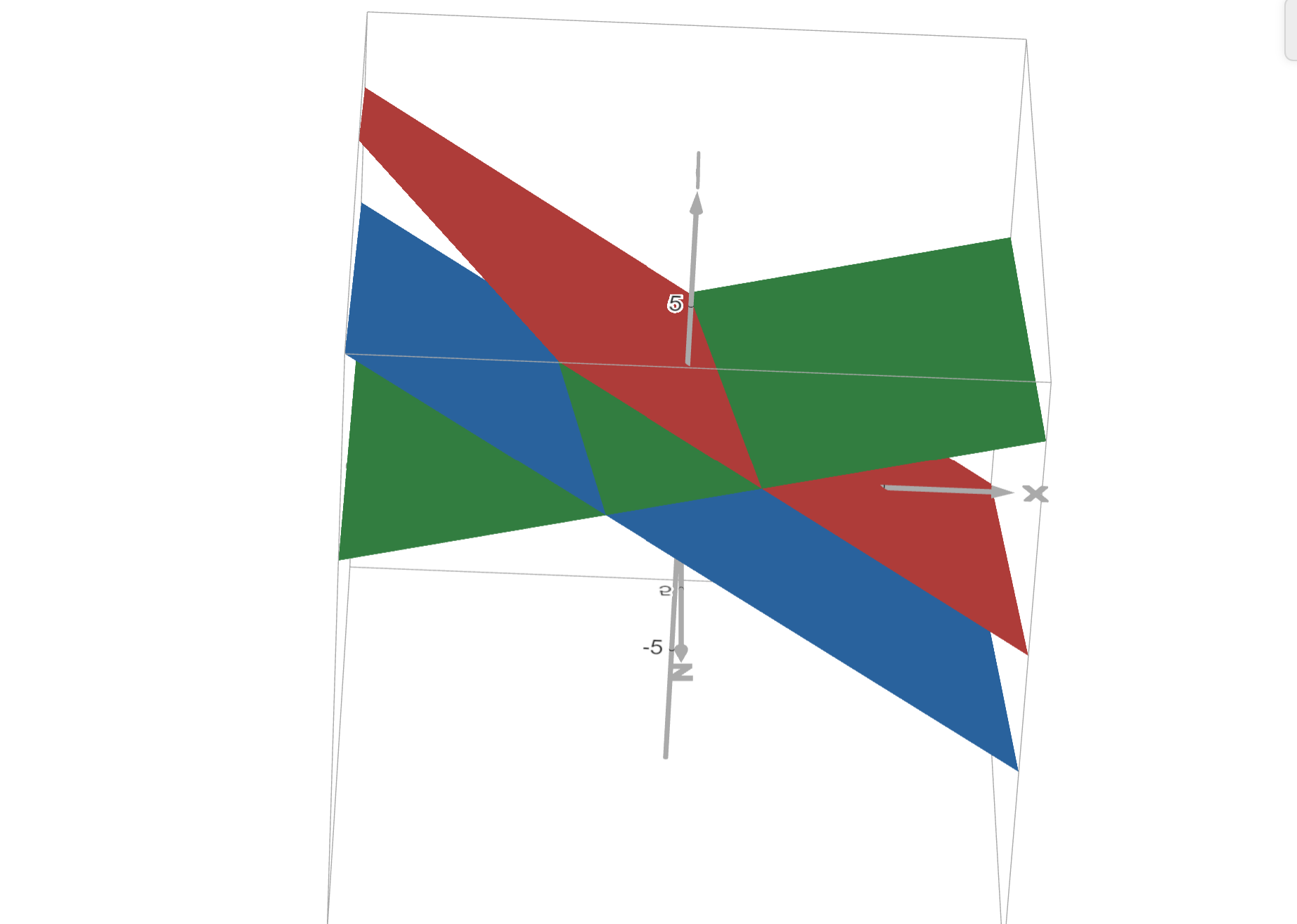
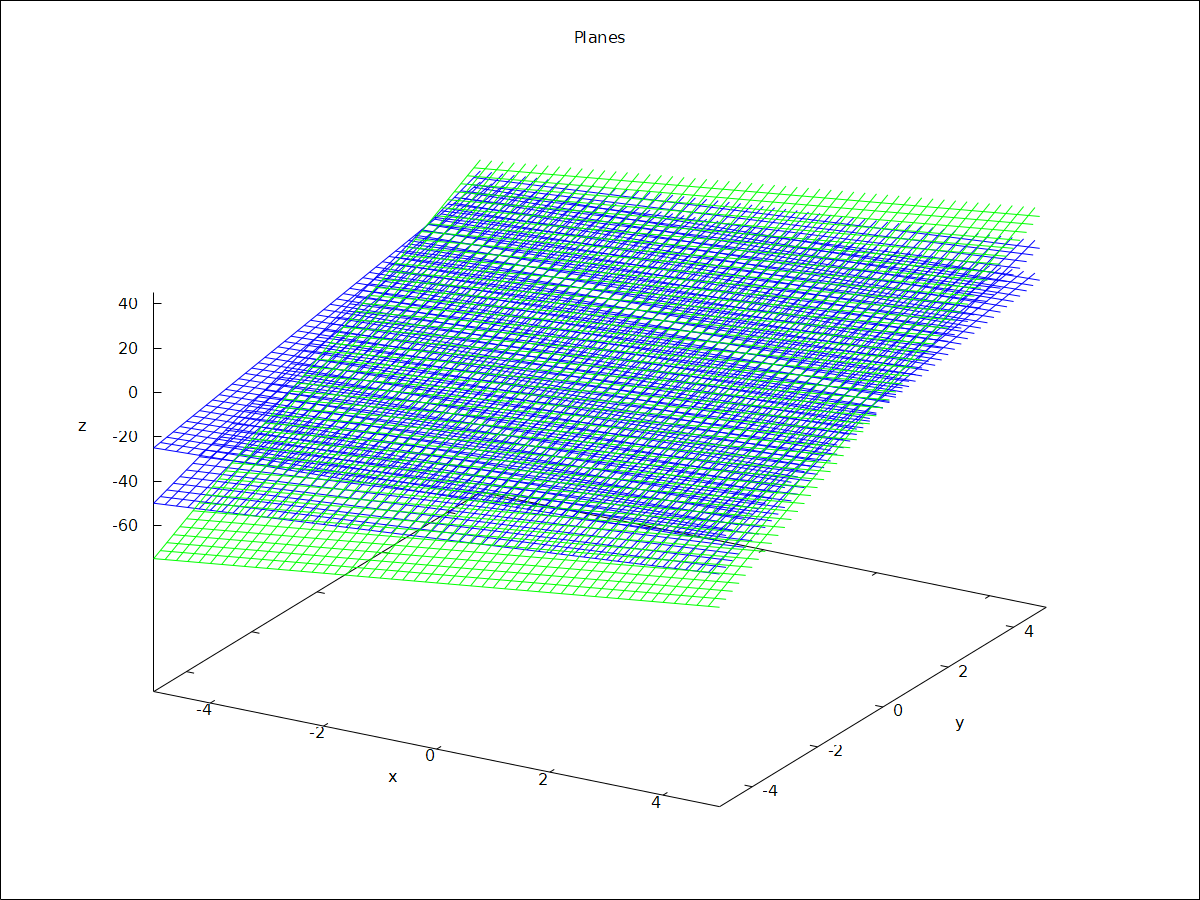
Case 4 (two parallel planes are intersected by the third one).
Two figures (one is plotted with Maxima and another one is plotted with Desmos) illustrate the situation when two parallel planes are crossed by the third plane; this case shows that there is no solution because three planes have no no common point.

|
|

|
Next figure shows that there is a unique solution. You will learn shortly how Maxima can
detect this conclusion in a blank of eye.
|
Case A (intersection over a line):
Consider the linear system of equations:

|
The figure at left shows that there are infinitely many solutions. If we substitute z = 0 (from the first
equation) into two other equations, we see that they are equivalent.
|
Case B (intersection over a line):
Consider the linear system of equations:

|
Next figure shows that there are infinitely many solutions. If we substitute z = 0 (from the first
equation) into two other equations, we see that they are equivalent.
|
Case C (All three planes coincide):
|
Our next system of equations shows another extreme case when all three planes coincide:
\[
\begin{split}
3y +x - 5 &= 0,
\\
2x + 6y -10 &= 0 ,
\\
9y + 3x -15 &= 0 .
\end{split}
\]
Plot3D[{x + 3*y - 5}, {x, -2, 2}, {y, -2, 2},
Axes -> False, Boxed -> False]
|
General System of Linear Equations
We will develop a systematic way to do this for any number of equations with arbitrary number of unknowns (often denoted as x₁, x₂, x₃, …) through the use of matrices and vectors.
A special and important class of systems of linear equations that always have at least one solution is the class of homogeneous equations. These are systems where every bi = 0, i = 1, 2, … , m. One solution to such a system will always be when each variable is 0. This means for a system of two or three variables, the graph of each equation in a homogeneous system passes through the origin.
Matrix Notation
Remark: There is no universally accepted form for matrix notation---some authors use brackets others parentheses for embracing entries. The coefficient matrix A is usually presented by entering entries row by row. However, in some applications, entries may be encored in a form presented by matrix A′. In this tutorial, we strictly distinguish matrices in brackets and parentheses when they act as operators (homomorphisms). ▣
-
Which of the following are linear equations? If an equation is not a linear equation,
tell why.
\[ {\bf (a)} \quad 6\,x + x\,y + 3\, z = 2; \qquad {\bf (b)} \quad 5\,a -\pi + 3\,b =0; \]\[ {\bf (c)} \quad \cos \left( \frac{\pi}{2} \right) x^2 -\sin (\pi )\, x\,y + 2\, z = 6; \qquad {\bf (d)} \quad \sqrt{x} -3\,y -z =1. \]
-
Solve each system of equations.
\[ {\bf (a)} \quad \begin{cases} 2\,x + 3\,y &= 2, \\ -4\,x-y &= 1; \end{cases} \qquad {\bf (b)} \quad \begin{cases} 2\,x + 4\,y &= -4, \\ 3\,x+ 5\,y &= 1; \end{cases} \]
- Find the point of intersection of the lines x −4y = −2 and 3x + 2y = 8.
-
Solve systems of equations:
\[ {\bf (a)} \quad \begin{split} \phantom{x} - 3\,y +4\,z&= \phantom{-}28, \\ 2\,x-8\,y + 6\,z &= -42 , \\ -5\,x +5\,y -2\,z &= \phantom{-}56; \end{split} \qquad {\bf (b)} \quad \begin{split} 2\,x - 2\,y + z&= 145, \\ 3\,x -y + 10\,z &= 203, \\ x+ 2\,y + 6\,z &= \phantom{1}58; \end{split} \]\[ {\bf (c)} \quad \begin{split} 2\,x - 2\,y + z &= 75, \\ \phantom{x+} 2y + 6\,z &= 30 , \\ x + 2y +2z &= 0; \end{split} \qquad {\bf (d)} \quad \begin{split} 4\,x + 5\,y -z &= 310, \\ 2x+ 3\,y + 2z &= 0, \\ 8x+ 5\,y + 4z &= 186 . \end{split} \]
-
In the study of heat transfer, it is important to determine the steady-state temperature distribution of a thin plate when the temperature around the boundary is known (usually from an experiment or other measurement). Let us consider the plate shown in Figure below representing a cross section of a metal beam, with negligible heat flow in the direction perpendicular to the plate. Let t₁, t₂, t₃, t₄ denote the temperatures at the four interior nodes of the mesh in Figure. The temperature at a particular node is approximately equal to the average of the four nearest nodes---to the left, above, to the right, and below.
Write a system of four equations whose solution gives estimates for the temperatures t₁, t₂, t₃, t₄.
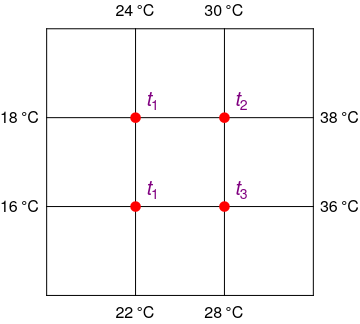
Temperature distribution -
Cubic spline interpolation provides a polynomial approximation that has smaller error than some other interpolating polynomials such as Lagrange polynomial and Newton polynomial. Suppose you need to interpolate a function f on some interval [x₁, x₂] given its values at end points f₁ = f(x₁) and f₂ = f(x₂). If you know the values of derivatives at these end points g₁ = f'(x₁) and g₂ = f'(x₂), find a system of linear equations for coefficients of cubic polynomial p(x) = 𝑎 x³ + b x² + c x + d so that this polynomial matches the values of f at end points f₁, f₂ and the values of its derivatives at end points g₁, g₂.
Write a system of four equations for four unknowns 𝑎, b, c, and d.
- Suppose you are given a parabola y = 𝑎 x² + b x + c that passes through the points (x₁, y₁), (x₂, y₂), and (x₃, y₃). Determine an augmented matrix for the corresponding system of linear equations in unknowns 𝑎, b, and c.
- Suppose that you want to find values for 𝑎, b, and c such that the parabola y = 𝑎 x² + b x + c passes through the points (1, 2), (2, 5), and (−2, 3). Find (but do not solve) a system of linear equations whose solutions provide values for 𝑎, b, and c.
-
In each part of the problem, find a linear system in the unknowns x₁, x₂, x₃, …, that corresponds to the given augmented matrix.
\[ {\bf (a)} \quad \left( \begin{array}{cccc|c} -1& 3 & 2 & -7 & 8 \\ \phantom{-}2 & 1 & 0 & -8 & 7 \\ \phantom{-}6 & 8 & 3 & \phantom{-}2 & 5 \end{array} \right) , \qquad {\bf (b)} \quad \left( \begin{array}{cccc|c} \phantom{-}3& -2 & 7 & -1 & 6 \\ \phantom{-}4 & -1 & 9 & -5 & 8 \\ -1 & \phantom{-}6 & 4 & \phantom{-}9 & 2 \end{array} \right) , \]\[ {\bf (c)} \quad \left( \begin{array}{cccc|c} -2& 7 & -6 & \phantom{-}2 & 7 \\ \phantom{-}5 & 2 & \phantom{-}9 & -2 & 1 \\ -4 & 4 & \phantom{-}7 & \phantom{-}5 & 3 \\ \phantom{-}2 & 4 & -5 & -1 & 2 \end{array} \right) , \qquad {\bf (d)} \quad \left( \begin{array}{cccc|c} \phantom{-}8& -3 & 5 & -6 & 1 \\ \phantom{-}2 & -7 & 5 & -4 & 2 \\ -1 & \phantom{-}4 & 2 & \phantom{-}9 & 4 \\ \phantom{-}4 & \phantom{-}7 & 9 & -2 & 3 \end{array} \right) . \]
-
In each part of the problem, find the augmented matrix for the linear system.
\[ {\bf (a)} \quad \begin{cases} \phantom{-}3\,x_2 &= \phantom{-}6, \\ -4\,x_2 &= -8 , \\ \phantom{-}5\, x_2 &= 10; \end{cases} \qquad {\bf (b)} \quad \begin{cases} 2\,x_1 + 7\,x_2 + x_3 &= -4, \\ 9\,x_2 + 2\,x_3 &= \phantom{-}1; \end{cases} \]\[ {\bf (c)} \quad \begin{cases} \phantom{-}7\,x_1 - 3\,x_2 + 3\,x_3 &= -1, \\ -4\,x_1 + 6\,x_2 - 2\,x_3 &= -2 , \\ \phantom{-}5\,x_1 + 3\, x_2 - 7\,x_3 &= \phantom{-}1; \end{cases} \qquad {\bf (d)} \quad \begin{cases} \phantom{-}x_1 - 5\,x_2 + 2\,x_3 &= -3, \\ \phantom{-}3\,x_1 - 4\,x_2 + 5\,x_3 &= \phantom{-}3, \\ -4\,x_1 - 6\,x_2 + 9\,x_3 &= -5, \end{cases} \]
- Higham, Nicholas, Gaussian Elimination, Manchester Institute for Mathematical Sciences, School of Mathematics, The University of Manchester, 2011.
- Lay, D.C., Lay, S.R., McDonald, J.J., Linear Algebra and its Applications, Pearson.