Introduction to Linear Algebra
Systems of Linear Equations
- Introduction
- Linear Systems
- Vectors
- Linear combinations
- Matrices
- Planes in ℝ³
- Reduced Row-Echelon Form
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Rotations
- Linear transformations
- Affine maps
- Exercises
- Answers
Matrix Algebra
- Introduction
- Manipulation of matrices
- Partitioned matrices
- Block matrices Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Equivalent matrices
- Elimination: A = LU
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Vector Spaces
- Introduction
- Motivation
- Vector Spaces
- Bases
- Dimension
- Coordinate systems
- Change of basis
- Linear transformations
- Matrix transformations
- Compositions
- Isomorphisms
- Dual transformations
- Direct sums
- Quotient spaces
- Vector products
- Cross products
- Rank
- Solving A x = b
- Exercises
- Answers
Eigenvalues, Eigenvectors
- Introduction
- Characteristic polynomials
- Companion matrix
- Algebraic and geometric multiplicities
- Minimal polynomials
- Eigenspaces
- Where are eigenvalues?
- Eigenvalues of A B and B A
- Generalized eigenvectors
- Similarity
- Diagonalizability
- Self-adjoint operators
Euclidean Spaces
- Introduction
- Dot product
- Bilinear transformations
- Inner product
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Orthogonality
- Gram--Schmidt process
- Orthogonal sets
- Self-adjoint matrices
- Unitary matrices
- Projection operators
- QR-decomposition
- Least Square Approximation
- Quadratic forms
- Exercises
- Answers
Matrix Decompositions
- Introduction
- Symmetric matrices
- LU-decomposition
- Sylvester formula
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- Singular values
- SVD
- Pseudoinverse
- Exercises
- Answers
Applications
- GPS problem
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
Functions of Matrices
- Introduction
- Diagonalization
- Sylvester formula
- The Resolvent method
- Polynomial interpolation
- Positive matrices
- Roots
- Pseudoinverse
- Exercises
- Answers
Miscellany
- Circles along curves
- TNB frames
- Tensors
- Tensors in ℝ³
- Tensors & Mechanics
- Differential forms
- Calculus
- Vector Representations
- Matrix Representations
- Change of Basis
- Orthonormal Diagonalization
- Generalized Inverse
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves systems of Linear Equations
- Location of eigenvalues
- Power method
- Iterative method
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
The determinant is a special scalar-valued function defined on the set of square matrices. Although it still has a place in many areas of mathematics and physics, our primary application of determinants is to define eigenvalues and characteristic polynomials for a square matrix A. It is usually denoted as det(A), det A, or |A|. The term determinant was first introduced by the German mathematician Carl Friedrich Gauss in 1801. There are various equivalent ways to define the determinant of a square matrix A, i.e., one with the same number of rows and columns. The determinant of a matrix of arbitrary size can be defined by the Leibniz formula or the Laplace formula (see next section).
Determinants
Because of difficulties with motivation, intuitiveness, and simple definition, there is a tendency in exposition of linear algebra without classical involvement of determinants (see {1,2]). Since we respect both approaches, the tutorial presents several definitions of determinants. One of popular approaches is to define a determinant of a square matrix as a product of all its eigenvalues (which is a topic of next section), counting multiplicities. If the reader wants to follow this easy to remember definition, then the order of reading sections should be changed or we refer to S. Axler's textbook. It should be noted that both approaches still wait for efficient numerical algorithms. Now almost all computational software packages evaluate the determinant in O(n3) arithmetic operations by forming the LU decomposition. We start with non-constructive definition of determinant.
An inversion in a permutation π is any pair (i,j) ∈ n × n for which i < j and π(i) > &pi(j).
A permutation is called even if it has an even number of inversions and odd otherwise.
Theorem 1: Let V be a vector space and let μ be an alternation n-linear functional. If σ is a permutation of the first n integers, then \[ \mu \left( {\bf v}_{\sigma (1)} , \ {\bf v}_{\sigma (2)} , \ \ldots , \ {\bf v}_{\sigma (n)} \right) = \mbox{sign} \left( \sigma \right) \mu \left( {\bf v}_{1}, \ {\bf v}_{2}, \ \ldots , \ {\bf v}_{n} \right) . \]
The Laplace expansion, named after Pierre-Simon Laplace, also called cofactor expansion, is an expression for the determinant |A| of an n × n matrix A that is a weighted sum of the determinants of n sub-matrices of A, each of size (n−1) × (n−1). The Laplace expansion (which we discuss in the next section) as well as the Leibniz formula are of theoretical interest as one of several ways to view the determinant, but not for practical use in determinant computation.
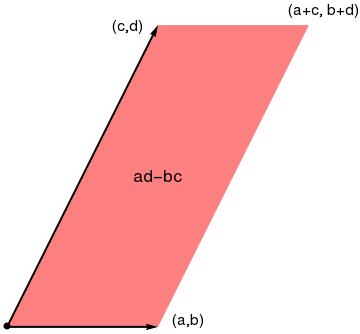
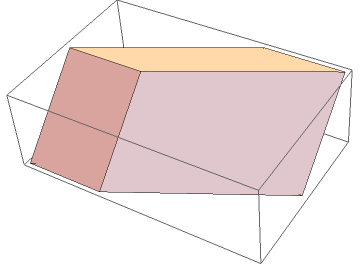
Determinants are used to determine the volumes of parallelepipeds formed by n vectors in n-dimensional Euclidean space. In 2 and 3 dimensional cases, the determinant is the area of parallelogram and the volume of parallelepiped, respectively. We plot them with Mathematica
v1 = {1, 2};
v2 = {1, 0};
ill = {Black, PointSize[Large], Point[p], Arrowheads[Medium], Thick, Arrow[{p, v1}], Arrow[{p, v2}]};
par = Graphics[{Pink, Parallelogram[p, {v1, v2}], ill}]
txt1 = Graphics[ Text[Style["(a,b)", FontSize -> 14, Black], {1.2, 0.05}]];
txt2 = Graphics[ Text[Style["(c,d)", FontSize -> 14, Black], {0.8, 2.0}]];
txt3 = Graphics[ Text[Style["(a+c, b+d)", FontSize -> 14, Black], {2.1, 2.1}]];
txt4 = Graphics[ Text[Style["ad-bc", FontSize -> 16, Black], {1.0, 1.0}]];
Show[par, txt1, txt2, txt3, txt4]
The Leibniz formula for the determinant of a 2 × 2 matrix is
The formula for the determinant of a 3 × 3 matrix is
In general, the determinant of an n × n matrix contains n! terms, half of them come up with positive sign and another half are negative.
Properties of the determinant:
- det(In) = 1, where In in the n × n identity matrix.
- det(AT) = det(A), where AT denotes the transpose of A.
- If A is a square matrix with a zero row or column, then its determinant is zero.
- For square matrices A and B of equal size, det(AB) = det(A) det(B) = det(B) det(A).
-
\[ \det \left( {\bf A}^{-1} \right) = \frac{1}{\det \left( {\bf A} \right)} . \]
- \( \det \left( k{\bf A} \right) = k^n \det \left( {\bf A} \right) \) for a constant k.
- If A is a triangular matrix, i.e. ai,j = 0 whenever i > j or, alternatively, whenever i < j, then its determinant equals the product of the diagonal entries.
- If B is a matrix resulting from an n × n matrix A by elementary row operation of swapping two rows, then det(B) = -det(A).
- If B is a matrix resulting from an n × n matrix A by elementary row operation of multiplying by a scalar k any row, then det(B) = k det(A).
- If B is a matrix resulting from an n × n matrix A by elementary row operation of multiplying by a scalar k any row and adding to another row, then det(B) = det(A).
2. If A = [𝑎i,j], then \[ \det {\bf A} = \sum_{\sigma \in S_n} \mbox{sign}\left( \sigma \right) a_{1, \sigma (1)} a_{2, \sigma (2)} \ \cdots \ a_{n, \sigma (n)} . \] Since the ij-entry in transposed matrix AT is 𝑎j,i, we also have \[ \det {\bf A}^{\mathrm T} = \sum_{\rho \in S_n} \mbox{sign}\left( \rho \right) a_{\rho (1),1} a_{\rho (2), 2} \ \cdots \ a_{\rho (n),n} \] The sets of subscripts in the two sums are identical. The result follows.
3.
4. Let A = [𝑎i,j] and B = [bi,j] belong to 𝔽n×n. Let column j of A be 𝑎j and column j of B be bj. We have \[ {\bf A}\,{\bf B} = \left[ {\bf A}\,{\bf b}_1 \ {\bf A}\,{\bf b}_2 \ \cdots \ {\bf A}\,{\bf b}_n \right] . \] So for the determinant mapping δ, \[ \det \left( {\bf A}\,{\bf B} \right) = \delta \left( {\bf A}\,{\bf b}_1 ,\ {\bf A}\,{\bf b}_2 ,\ \cdots , \ {\bf A}\,{\bf b}_n \right) . \] Since \( \displaystyle {\bf A}\,{\bf b}_j = b_{1,j} {\bf a}_1 + b_{2,j} {\bf a}_2 + \cdots + b_{n,j} {\bf a}_n , \quad \) Theorem 1 implies \[ \det \left( {\bf A}\,{\bf B} \right) = \sum_{\sigma \in S_n} \mbox{sign}\left(\sigma \right) b_{1,\sigma (1)} b_{2,\sigma (2)} \cdots b_{n,\sigma (n)} \,\delta \left( {\bf a}_1 , \ldots , {\bf a}_n \right) = \left( \det{\bf B} \right) \left( \det {\bf A} \right) . \] The result follows the observation that (det B)(det A) = (det A)(det B).
5. If A is invertible square matrix, then from \[ \det\left( {\bf A}^{-1} {\bf A} \right) = \det \left( {\bf I}_n \right) = 1, \] it follows that det(A−1A) = det(A−1) det(A), it follows that neither detA nor detA−1 is zero and that detA−1 = 1/detA.
6.
7. Let A = [𝑎i,j] be upper triangular square matrix, so that 𝑎i,j = 0 if i > j. Suppose ρ is different from ι in Sn. Let i in [1..n] be maximal so that ρ(i) ≠ i. If ρ(i) = j, then since ρ is a bijection, ρ(j) ≠ j, so i > j. It follows that \( \displaystyle a_{i,\rho (i)} = 0. \) From here we see that when ρ is in Sn, the only nonzero expression of the form \[ a_{1.\rho (1)} a_{2.\rho (2)} \cdots a_{n.\rho (n)} \] is the one for which ρ = ι. This proves the statement when A is upper triangular. We leave proof of the lower triangular case as an exercise.
8.
9.
10.
Corollary 1: Similar matrices have the same determinant.
If we can transform a general square matrix A into a new triangular matrix T without changing the value (or as alternative, with simple and clear its modification), then we would have a method of computing its determinant. The way to change a general square matrix into an upper triangular matrix is through the three elementary row operations and their corresponding matrix multiplication counterparts. A matrix that is similar to a triangular matrix is referred to as triangularizable. Every matrix over the field of complex numbers ℂ is triangularizable, but not every real-valued matrix.
Consider the matrix
Det[A]
B = {{4, 2, 1, -1}, {3, 2, -4, 1}, {2, 3, -1, 5}, {2, -1, 1, -6}}
A.B
Det[Aswaprows]
Det[Amultiply]
Det[Aadd]
Now it is time to make the process of converting a matrix to upper triangular a bit more automated using Mathematica. This can be done with two steps: first we use subroutine PivotDown that annihilates all entries in a column below a desired location. The second function, DetbyGauss uses PivotDown to convert a matrix to upper triangular, and when possible, do it without row exchange.
Block[{k}, If[m[[i, j]] == 0, Return[m]];
Return[Table[
Which[k < i, m[[k]], k > i, m[[k]] - m[[k, j]]/m[[i, j]] m[[i]],
k == i && oneflag == 0, m[[k]] , k == 1 && oneflag == 1,
m[[k]]/m[[i, j]] ], {k, 1, Length[m]}]]]
row = 1; column =1; matrix = mat; swap = 0;
{m,n} = Dimensions[mat];
While[row < m && column < n,
Which[ matrix[[row, column]] != 0, matrix = PivotDown[matrix, {row, column}];
row ++; column ++;,
matrix[[row, column]] == 0, swap ++;
If[ Union[ Table[matrix[[k, column]], {k,row + 1, m}]] == {0}, swap --; column ++;,
t = row + Position[Map[#1 != 0 &, Table[matrix[[k, column]], {k, row +1, m}]], True][[1,1]];
matrix = Table[Which[k == row, matrix[[t]], k==t, matrix[[row]], True, matrix[[k]] ], {k,1,m}]] ]];
If[ swap >0, Print["there were ", swap, " row swap(s) "]];
Print[MatrixForm[matrix]];
Return[matrix]]
\( \begin{pmatrix} 3&2&-1&4 \\ 0&2&5&-1 \\ 0&0&6&- \frac{5}{3} \\ 0&0&0&-\frac{1}{18} \end{pmatrix} \)
- Convert the following matrices to upper triangular form and calculate the determinant. \[ \mbox{(a)} \quad \begin{bmatrix} 1&-1&1&-1 \\ -1&-1&-4&1 \\ 3&3&-1&1 \\ 8&-4&4&-5 \end{bmatrix} , \qquad \mbox{(b)} \quad \begin{bmatrix} 1&8&-3&8 \\ 6&1&-3&4 \\ 3&6&-1&5 \\ 7&-2&3&-4 \end{bmatrix} , \] \[ \mbox{(c)} \quad \begin{bmatrix} 3&5&-3&9&1 \\ -1&6&2&-3&4 \\ 3&4&6&-2&4 \\ 2&-2&5&3&-4 \\ 1&6&7&-1&2 \end{bmatrix} , \qquad \mbox{(d)} \quad \begin{bmatrix} 2&4&-2&1&1 \\ -1&5&1&-4&2 \\ 2&3&5&-1&3 \\ 1&-1&3&4&-2 \\ 1&6&7&-1&2 \end{bmatrix} \]
- Abeles, F.F., Chiò's and Dodgson's determinantal identities, Linear Algebra and its Applications, Volume 454, 1 August 2014, Pages 130-137.
- Axler, Sheldon, Down with determinants!, The American Mathematical Monthly, 1995, 102, No. 2, pp. 139--154.
- Axler, Sheldon, Linear Algebra Done Right (second edition), Springer, 1997.
- Muir, Thomas (1960) [1933], A treatise on the theory of determinants, Revised and enlarged by William H. Metzler, New York, NY: Dover
- Determinant Interactive Program and Tutorial by Kardi Teknomo.
- Determinants of order up to 6.
- Alsulaimani, Hamdan, Diagonal and triangular matrices, 2012.
- Salihu, A., Marevci, F., Chio’s-like method for calculating the rectangular (non-square) determinants: Computer algorithm interpretation and comparison, European journal of Pure and Applied Mathematics, Vol. 14, No. 2, 2021, pp. 431-450.