
Introduction to Linear Algebra
Systems of Linear Equations
- Introduction
- Linear systems
- Vectors
- Linear combinations
- Matrices
- Planes in ℝ³
- Reduced Row-Echelon Form
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Linear transformations
- Affine maps
- Exercises
- Answers
Matrix Algebra
- Introduction
- Manipulation of matrices
- Partitioned matrices
- Block matrices
- Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Equivalent matrices
- Elimination: A = L U
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Vector Spaces
- Introduction
- Motivation
- Vector spaces
- Bases
- Dimension
- Coordinate systems
- Linear transformations
- Change of basis
- Matrix transformations
- Compositions
- Isomorphisms
- Dual transformations
- Quotient spaces
- Wedge products
- Rotors
Eigenvalues, Eigenvectors
- Introduction
- Characteristic polynomials
- Companion matrix
- Algebraic and geometric multiplicities
- Minimal polynomials
- Eigenspaces
- Where are eigenvalues?
- Eigenvalues of A B and B A
- Generalized eigenvectors
- Similarity
- Diagonalizability
- Self-adjoint operators
- Exercises
- Answers
Euclidean Spaces
- Introduction
- Dot product
- Euclidean space
- Bilinear transformations
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Examples of transformations
- Orthogonality
- Gram--Schmidt Process
- Orthogonal matrices
- Self-adjoint matrices
- Unitary matrices
- Projection operators
- QR-decomposition
- Least Square Approximation
- Quadratic forms
- Exercises
- Answers
Matrix Decompositions
- Introduction
- 2D decomposition
- Symmetric matrices
- Symmetric matrices
- Pseudoinverse
- URV-decomposition
- LU-decomposition
- QR-decomposition
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- CUR decomposition
- Exercises
- Answers
Tensors
- Introduction
- Circles along curves
- TNB frames
- Tensors
- Tensors in ℝ³
- Tensors & Mechanics
- Differential forms
- Calculus
- Answers
Applications
- Introduction
- GPS problem
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- FSA
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
- Answers
Functions of Matrices
- Introduction
- Diagonalization
- Sylvester formula
- The Resolvent method
- Polynomial interpolation
- Positive matrices
- Roots <
- Pseudoinverse
- Exercises
- Answers
Miscellany
- Introduction
- Circles along curves
- TNB frames
- Differential forms
- Calculus
- Vector representations
- Matrix representations
- Change of basis
- Orthonormal Diagonalization
- Generalized inverse
- Differential forms
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves Systems of Linear Equations
- Location of Eigenvalues
- Power Method
- Iterative Method
- Similarity and Diagonalization
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
Let A and B be nonempty subsets of a vector space V. The sum of A and B, denoted A + B, is the set of all possible sums of elements from both subsets: \( A+B = \left\{ a+b \, : \, a\in A, \ b\in B \right\} . \)
Direct Sums
A vector space V is called the direct sum of V1 and V2 if V1 and V2 are subspaces of V such that \( V_1 \cap V_2 = \{ 0 \} \) and \( V_1 + V_2 = V. \) This means that every vector v from V is uniquely represented via sum of two vectors \( {\bf v} = {\bf v}_1 + {\bf v}_2 , \quad {\bf v}_1 \in V_1 , \ {\bf v}_2 \in V_2 . \) We denote that V is the direct sum of V1 and V2 by writing \( V = V_1 \oplus V_2 . \)
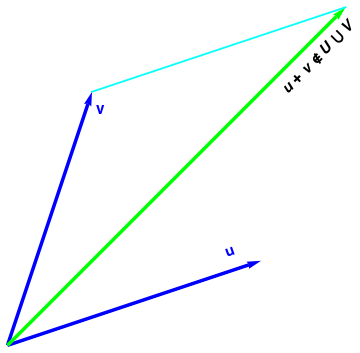
If we choose two arbitrary not parallel vectors u and v on the plane, then spans of these vectors generate two vectors spaces that we denote by U and V, respectively. Therefore, U and V are two lines containing vectores u and v, respectively. Their sum, \( U + V = \left\{ {\bf u} +{\bf v} \,: \ {\bf u} \in U, \ {\bf v} \in V \right\} \) is the whole plane \( \mathbb{R}^2 . \)
g2 = Graphics[{Blue, Thickness[0.01], Arrow[{{0, 0}, {1, 3}}]}]
g3 = Graphics[{Green, Thickness[0.01], Arrow[{{0, 0}, {4, 4}}]}]
g4 = Graphics[{Cyan, Thickness[0.005], Line[{{1, 3}, {4, 4}}]}]
g5 = Graphics[ Text[Style[
ToExpression["u + v \\notin U\\cup V", TeXForm, HoldForm],
FontSize -> 14, FontWeight -> "Bold", FontColor -> Black], {3.6, 3.5}, {0, 1}, {1, 1}]]
g6 = Graphics[
Text[StyleForm["u", FontSize -> 14, FontWeight -> "Bold",
FontColor -> Blue], {2.6, 1.2}, {0, 0.8}, {2.8, 1}]]
g7 = Graphics[
Text[StyleForm["v", FontSize -> 14, FontWeight -> "Bold",
FontColor -> Blue], {1.1, 2.8}]]
Show[g1, g2, g3, g4, g5, g6, g7]
It is easy to see that any polynomial (or function) can be ubiquely decomposed into direct sum of even and odd counterparts:
Before formulating the Primary Decomposition Theorem, we need to recall some definitions and facts that were explained in other sections. We remind that the minimal polynomial of a square matrix A (or corresponding lineat transformation) is the (unique) monic polynomial ψ(λ) of least degree that annihilates the matrix A, that is ψ(A) = 0. The minimal polynomial \( \psi_u (\lambda ) \) of a vector \( {\bf u} \in V \ \mbox{ or } \ {\bf u} \in \mathbb{R}^n \) relative to A is the monic polynomial of least degree such that \( \psi_u ({\bf A}) {\bf u} = {\bf 0} . \) It follows that \( \psi_u (\lambda ) \) divides the minimal polynomial ψ(λ) of the matrix A. There exists a vector \( {\bf u} \in V (\mathbb{R}^n ) \) such that \( \psi_u (\lambda ) = \psi (\lambda ) . \) This result can be proved by representing the minimal polynomial as the product of simple terms to each of which corresponds a subspace. Then the original vector space (or \( \mathbb{R}^n \) ) is the direct sum of these subspaces.
A subspace U of a vector space V is said to be T-cyclic with respect to a linear transformation T : V ⇾ V if there exists a vector \( {\bf u} \in U \) and a nonnegative integer r such that \( {\bf u}, T\,{\bf u} , \ldots , T^r {\bf u} \) form a basis for U. Thus, for the vector u if the degree of the minimal polynomial \( \psi_u (\lambda ) \) is k, then \( {\bf u}, T\,{\bf u} , \ldots , T^{k-1} {\bf u} \) are linearly independent and the space U is spanned by these k vectors is T-cyclic.
Theorem (Primary Decomposition Theorem): Let V be an n-dimensional vector space (n is finite) and T is a linear transformation on V. Then V is the direct sum of T-cyclic subspaces. ■
To show the existence of W enlarge the basis \( {\bf e}_1 = {\bf u}, {\bf e}_2 = T{\bf u} , \ldots , {\bf e}_k = T^{k-1} {\bf u} \) of U to a basis \( {\bf e}_1 , {\bf e}_2 , \ldots , {\bf e}_k , \ldots , {\bf e}_n \) of V and let \( {\bf e}_1^{\ast} , {\bf e}_2^{\ast} , \ldots , {\bf e}_k^{\ast} , \ldots , {\bf e}_n^{\ast} \) be the dual basis in the dual space. Recall that the dual space consists of all linear forms on V or, equivalently, of all functionals on V. To simplify notation, let z = ek*. Then
Finally, we shall prove that \( U^{\ast} \cap U^{\perp} = \{ 0 \} \) and dim U* = k simultaneously as follows. Suppose that \( a_0 {\bf z} + a_1 T^{\ast} {\bf z} + \cdots + a_s T^{\ast s} {\bf z} \in U^{\perp} , \) where \( a_s \ne 0 \) and \( 0 \le s \le k-1 . \) Then
Annihilators and Direct Sums
Consider a direct sum decomposition of a vector space over field 𝔽:Theorem 2: Let V = S ⊕ T be a direct decomposition of a vector space V. The extension by 0 map is an isomorphism from T* to S⁰, and so \[ T^{\ast} \cong S^0 . \] If V is finite-dimensional, then \[ \dim\left( S^0 \right) = \mbox{codim}\left( S \right) = \dim \left( V/S \right) = \dim V - \dim S . \]
Theorem 3: A linear functional on the direct sum V = S ⊕ T can be written as a sum of a linear functional that annihilates S and a linear functional that annihilates T, that is, \[ \left( S \oplus T \right)^{\ast} = S^0 \oplus T^0 . \]
- Axier, S., Linear Algebra Done Right. Undergraduate Texts in Mathematics (3rd ed.). Springer. 2015, ISBN 978-3-319-11079-0.
- Beezer, R.A., A First Course in Linear Algebra, 2017.
- Dillon, M., Linear Algebra, Vector Spaces, and Linear Transformations, American Mathematical Society, Providence, RI, 2023.
- Halmos, Paul Richard (1974) [1958]. Finite-Dimensional Vector Spaces. Undergraduate Texts in Mathematics (2nd ed.). Springer. ISBN 0-387-90093-4.
- Roman, Steven (2005). Advanced Linear Algebra. Undergraduate Texts in Mathematics (2nd ed.). Springer. ISBN 0-387-24766-1.