
Introduction to Linear Algebra
Systems of Linear Equations
- Introduction
- Linear systems
- Vectors
- Linear combinations
- Matrices
- Planes in ℝ³
- Reduced Row-Echelon Form
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Linear transformations
- Affine maps
- Exercises
- Answers
Matrix Algebra
- Introduction
- Manipulation of matrices
- Partitioned matrices
- Block matrices
- Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Equivalent matrices
- Elimination: A = L U
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Vector Spaces
- Introduction
- Motivation
- Vector spaces
- Bases
- Dimension
- Coordinate systems
- Linear transformations
- Change of basis
- Matrix transformations
- Compositions
- Isomorphisms
- Dual transformations
- Quotient spaces
- Wedge products
- Rotors
Eigenvalues, Eigenvectors
- Introduction
- Characteristic polynomials
- Companion matrix
- Algebraic and geometric multiplicities
- Minimal polynomials
- Eigenspaces
- Where are eigenvalues?
- Eigenvalues of A B and B A
- Generalized eigenvectors
- Similarity
- Diagonalizability
- Self-adjoint operators
- Exercises
- Answers
Euclidean Spaces
- Introduction
- Dot product
- Euclidean space
- Bilinear transformations
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Examples of transformations
- Orthogonality
- Gram--Schmidt Process
- Orthogonal matrices
- Self-adjoint matrices
- Unitary matrices
- Projection operators
- QR-decomposition
- Least Square Approximation
- Quadratic forms
- Exercises
- Answers
Matrix Decompositions
- Introduction
- 2D decomposition
- Symmetric matrices
- Symmetric matrices
- Pseudoinverse
- URV-decomposition
- LU-decomposition
- QR-decomposition
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- CUR decomposition
- Exercises
- Answers
Tensors
- Introduction
- Circles along curves
- TNB frames
- Tensors
- Tensors in ℝ³
- Tensors & Mechanics
- Differential forms
- Calculus
- Answers
Applications
- Introduction
- GPS problem
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- FSA
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
- Answers
Functions of Matrices
- Introduction
- Diagonalization
- Sylvester formula
- The Resolvent method
- Polynomial interpolation
- Positive matrices
- Roots <
- Pseudoinverse
- Exercises
- Answers
Miscellany
- Introduction
- Circles along curves
- TNB frames
- Differential forms
- Calculus
- Vector representations
- Matrix representations
- Change of basis
- Orthonormal Diagonalization
- Generalized inverse
- Differential forms
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves Systems of Linear Equations
- Location of Eigenvalues
- Power Method
- Iterative Method
- Similarity and Diagonalization
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
The Wolfram Mathematic notebook which contains the code that produces all the Mathematica output in this web page may be downloaded at this link. Caution: This notebook will evaluate, cell-by-cell, sequentially, from top to bottom. However, due to re-use of variable names in later evaluations, once subsequent code is evaluated prior code may not render properly. Returning to and re-evaluating the first Clear[ ] expression above the expression no longer working and evaluating from that point through to the expression solves this problem.
Remove[ "Global`*"] // Quiet (* remove all variables *)
This section is devoted to illustrations of linear transformations on the plane using square matrices. This may help you to develop a geometric understanding of matrices and their relationship to coordinate space transformations in general. Every square matrix can be considered (and is indeed) as an operator that acts on column vectors from left-to-right, with output also written as column vector. We write these matrices in brackets. Also, the same square matrix can be considered as a matrix multiplication operator acting on row vectors from right. We embrace these matrices in parentheses. Then each linear transformation ℝn ⇾ ℝn is associated with a square n×n matrix A, and vise versa. When ℝn is recognized as the space of either column vectors, ℝn×1, or row vectors, ℝ1×n, a linear transformation in it is generated by matrix multiplication either from left: A x, or from right u A. Here x is an arbitrary column vector, x ∈ ℝn×1, and u is a row vector, u ∈ ℝ1×n. The relationship between these two forms of the matrix is called transposition (this is the topic of Part 2).
Plane linear transformations can be classified as reflections (or mirroring), contractions/expansions, shears, rotations, and projections (which is a topic of another section). The following subsections give appropriate terminologies for such transformations. The difference between matrix multiplication A x or u A and corresponding linear transformation TA : ℝ² ⇾ ℝ² is merely a matter of notation. Therefore, we can classify matrices instead of as linear maps. A common approach is to synthesize an arbitrary matrix from a limited set of primitive transformations.
Linear transformations can be decomposed into product (when we speak about matrices) or compositions (when we consider mappings) of simple operations. This decomposition into primitive or elementary matrices is not unique that allows to present the same transformation in a variety of simple compositions.
- Any 2D Linear Transformation can be decomposed into the product of a rotation, a scale (or line reflection), and a rotation, A = R₁SR₂.
- Any 2D congruence (being the same size and shape) can be decomposed into the product of 3 line reflection at the most.
- linearity,
- closed under composition,
- associativity,
- not commutative,
- applied left-to-right multiplication to column vectors,
- applied right-to-left multiplication to row vectors.
Plane Transformations
We demonstrate linear transformations acting on a house that we place at the origin, which is the corner {0,0} in the two-dimensional Euclidean plane. Matrix algebra is used to move this house with each transformation having the same common corner at the origin. The first is not a transformation but the baseline beginning point that will be transformed as we proceed. The object of choice is a parallelogram as transformation of the vector points is all that is required to make the change we desire.
Clear[house]; house[trans_ : {{1, 0}, {0, 1}}, label_ : "House in Quadrant I"] := Module[{para, tri, door}, para = Parallelogram[{0, 0}, trans]; tri = Triangle[{trans[[2]], {trans[[1, 1]], trans[[2, 2]]}, {.5*trans[[1, 1]], 1.5*trans[[2, 2]]}}]; door = Parallelogram[.4* trans[[1]], {.2*trans[[1]], .5 trans[[2]]}]; Graphics[{Blue, para, Red, tri, White, door}, Axes -> True, PlotLabel -> label, PlotRange -> {{-3, 3}, {-3, 3}}] ] houseNE = house[]

Uniform scale

|
\[ \begin{bmatrix} 1.5 & 0 \\ 0 & 1.5 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 0.6 & 0 \\ 0 & 0.6 \end{bmatrix} \] |

|
Nonuniform scale
|
|
\[ \begin{bmatrix} 1 & 0 \\ 0 & 1.5 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1.5 & 0 \\ 0 & 1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1.5 & 0 \\ 0 & 2 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1 & 0 \\ 0 & 0.6 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 0.6 & 0 \\ 0 & 1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1.5 & 0 \\ 0 & 0.6 \end{bmatrix} \] |

|
Scaling along an arbitrary axis
Reconstructing the solution from the observations above
Shear Map

|
\[ {\bf M} = \begin{bmatrix} 1 & \alpha \\ 0 & 1 \end{bmatrix} \] |

|
The code for the roof does not play well with the shear transform, so we dispense with the roof below, leaving only a door to remind us we started with a house. There are a number of ramifications to this worth mentioning before continuing. First, the roof is a triangle. Matrix algebra is about matrices, which are by their nature rectangles, not triangles. The reason the door survives in the illustration is that it is a rectangle, like the base. Second, when the base of the house is a rectangle the roof "follows" the base in the code, which is not true when the base is a non-rectangular parallelogram. This respects the reality that all rectangles are parallelograms but the converse is not true. Third, the house is a metaphor, an abstraction to advance the pedagogy in connection with linear algebra. We must be careful taking pedagogy into the real world. Put a roof on a base that is a tilted parallelogram and watch the house fall down to prove the importance of having the load orthogonal to its support in the real world where gravity matters.
|
|
\[ \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1 & -1 \\ 0 & \phantom{-}1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 1 & 0 \\ 1 & 1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} \phantom{-}1 & 0 \\ -1 & 1 \end{bmatrix} \] |

|
Reflection

|
A reflection in ℝ³ is a linear map f : ℝ³ ⇾ ℝ³ defined by
\begin{equation} \label{EqReflection.1}
f({\bf v}) = {\bf v} - 2 \left( \hat{\bf n} \bullet {\bf v} \right) \hat{\bf n}, \qquad \forall {\bf v} \in \mathbb{R}^3 ,
\end{equation}
where n ∈ ℝ³ is a unit vector to the plane of reflection and n • v denotes the dot product of two vectors.
|
Initially, the house is in the northeast quadrant of the Cartesian plane. Anything multiplied by the identity matrix is unchanged by that operation. So, beginning with the IdentityMatrix (original house) and proceeding clockwise, we name the four transformation matrices which first leaves the house where it is, then moves it, in three operations, from quadrant to quadrant.
The first three transformations can be considered as a special case of nonuniform scale.
Below, the first is the Identity Matrix and the last three are the reflection matrices.
|
|
\[ \begin{bmatrix} 1 & \phantom{-}0 \\ 0 & -1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} -1 & \phantom{-}0 \\ \phantom{-}0 & -1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} -1 & 0 \\ \phantom{-}0 & 1 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} \phantom{-}0 & -1 \\ -1 & \phantom{-}0 \end{bmatrix} \] |

|
|
|
\[ \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix} \] |

|
|
|
\[ \frac{1}{2} \begin{bmatrix} 1 & \sqrt{3} \\ \sqrt{3} & -1 \end{bmatrix} \] |

|
Rotation
For example, to generate a rhombus with vertices (0, 0), (1, 1), (0, 2), and (1, −1), we store the pairs as columns of a matrix: \[ {\bf T} = \begin{bmatrix} 0 & 1 & 0 & 1 & 0 \\ 0 & 1 & 2 & -1 & 0 \end{bmatrix} . \] An additional copy of the vertex (0, 0) is stored in the last column of T so that the previous point (1, −1) will be connected back to (0, 0) [see Figure 4.2.3(a)].

|
Leon, page 205, Figure 4.2.3
|
We can transform a figure by changing the positions of the vertices and then redrawing the figure. If the transformation is linear, it can be carried out as a matrix multiplication. Viewing a succession of such drawings will produce the effect of animation. The four primary geometric transformations that are used in computer graphics are as follows:
- Dilations and contractions. A linear operator of the form \[ T({\bf x}) = c\,{\bf x} \] is a dilation if c > 1 and a contraction if 0 < c < 1. The operator T is represented by the matrix cI, where I is the 2 × 2 identity matrix. A dilation increases the size of the figure by a factor c > 1, and a contraction shrinks the figure by a factor c < 1. Figure 4.2 shows a dilation by a factor of 1.5 of the rhombus stored in the matrix T.
-
Reflections about an axis. If Tx is a transformation that reflects a vector x
about the x-axis, then Tx is a linear operator and hence it can be represented
by a 2 × 2 matrix A. Since
\[
T_x ({\bf e}_1 ) = {\bf e}_1 \qquad \mbox{and} \qquad T_x ({\bf e}_2 ) = -{\bf e}_2 ,
\]
it follows that
\[
{\bf A} = \begin{bmatrix} 1 & \phantom{-}0 \\ 0 & -1 \end{bmatrix} .
\]
Similarly, if Ty is the linear operator that reflects a vector about the y-axis, then Ty is represented by the matrix \[ \left[ T_y \right] = \begin{bmatrix} -1 & 0 \\ \phantom{-}0 & 1 \end{bmatrix} . \] Figure 4.2.3(c) shows the image of the rhombus after a reflection about the y-axis.
Rhombus defined by T. Leon, page 205, Figure 4.2.3
Rhombus reflected by y. Leon, page 205, Figure 4.2.3 -
Rotations. Let T be a transformation that rotates a vector about the origin by
an angle θ in the counterclockwise direction. We saw in Example ???? that T is a
linear operator and that T(x) = A x, where
\[
{\bf A} = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \phantom{-}\cos\theta \end{bmatrix} .
\]
Figure 4.2.3(d) shows the result of rotating the triangle T by 60 ◦ in the
counterclockwise direction.
Rhombus rotated by 60°. Leon, page 205, Figure 4.2.3 - Translations. A translation by a vector a is a transformation of the form \[ T({\bf x}) = {\bf x} + {\bf a} . \] If a ≠ = 0, then T is not a linear transformation and hence T cannot be represented by a 2 × 2 matrix. However, in computer graphics it is desirable to do all transformations as matrix multiplications. The way around the problem is to introduce a new system of coordinates called homogeneous coordinates.
- An expansion along a coordinate axis.
- A compression along a coordinate axis.
- A shear along a coordinate axis.
- A reflection along y = x.
- A reflection about a coordinate axis.
- A compression or expansion along a coordinate axis followed by reflection about a coordinate axis.
The last matrix represents a reflection about y = x.
|
|
\[ \begin{bmatrix} 1 & 0 \\ \frac{3}{2} & 1 \end{bmatrix} \] |
|
These three successive row operations can be performed by multiplyingA on the left successively by \[ {\bf E}_1 = \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix} , \qquad {\bf E}_2 = \begin{bmatrix} \frac{2}{3} & 0 \\ 0 & 1 \end{bmatrix} , \qquad {\bf E}_3 = \begin{bmatrix} 1 & -\frac{2}{3} \\ 0 & \phantom{-}1 \end{bmatrix} . \] Inverting these matrices, we get
- shearing by factor of ⅔ in the abscissa direction;
- expanding by a factor of 3/3 in the x-direction;
- reflecting about the line y = x.

|

|

|
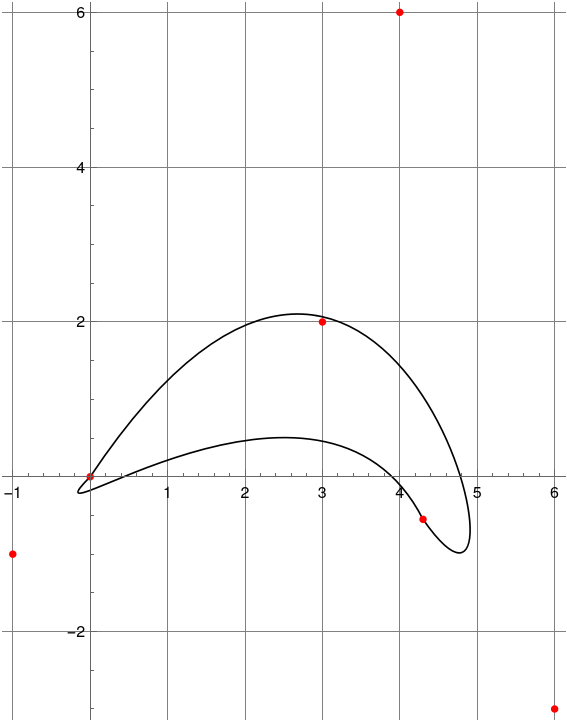
Calculate the bounding box of the curves
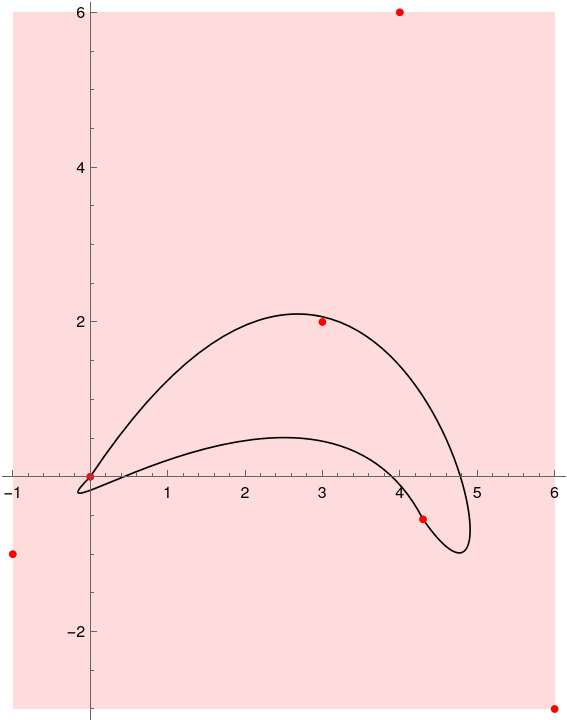
Calculate the midpoint of the bounding box
% // MatrixForm
MatrixForm[%]
Orthogonal projection
- Find the standard matrix for a linear transformation T: ℝ² ↦ ℝ² that first reflects points through the horizontal x1-axis and then reflects points through the line x1 = x2.
- Find the standard matrix for a linear transformation T: ℝ² ↦ ℝ² that first rotates points through -3π/4 radian (clockwise) and then reflects points the vertical x2-axis.
- Find the standard matrix for a linear transformation T: ℝ² ↦ ℝ² that maps i=(1,0) into 2i-3j but leaves the vector j=(0,1) unchanged.
- Find the standard matrix for a linear transformation T: ℝ² ↦ ℝ² that rotates points (about the origin) through 3π/2 radians (counterclockwise).
- In ℝ², clearly R(θ+φ) = R(θ) R(φ). By writing out these matrices and performing matrix multiplication, derive the laws for the sine and cosine of the sum of two angles.
- If you need the formulas for sin(θ + π/2) and cos(θ + π/2) and don't remember them, what is a simple way to find them ?
- Find all 2 × 2 rotation matrices that are also diagonal.
- In ℝ², if the list of vertices of a square starts with (0, 0) and (𝑎, b) going counterclockwise, what are the remaining two vertices? (Hint: The vertex opposite (𝑎, b) can be obtained by rotating (𝑎, b) by 90° about the origin.)
- Find the standard matrix for a linear transformation T: ℝ² ↦ ℝ² that rotates points (about the origin) through -π/4 radians (clockwise).
- If \( {\bf A} = \begin{bmatrix} 1&2 \\ -1&-2 \end{bmatrix} , \) find two matrices B ≠ C such that AB = AC.
- Suppose that numbers 𝑎 and b in matrix \( \displaystyle \quad \begin{bmatrix} \phantom{-}a&b \\ -b&a \end{\bmatrix} \quad \) are not both zero. Find the entries of rotation matrix that takes (1, 0) to a unit vector in the direction of (𝑎, b). (You don't need to express the angle of the rotation.)
- Show that a matrix \( \displaystyle \quad {\bf A} = \begin{bmatrix} \phantom{-}a&b \\ -b&a \end{\bmatrix} \quad \) is equal to a rotation matrix times a scalar matrix rI with r > 0. (Hence, x ← x A preserves shapes and orientation while expanding or contracting the size uniformly.)
- Anton, Howard (2005), Elementary Linear Algebra (Applications Version) (9th ed.), Wiley International
- Dunn, F. and Parberry, I. (2002). 3D math primer for graphics and game development. Plano, Tex.: Wordware Pub.
- Foley, James D.; van Dam, Andries; Feiner, Steven K.; Hughes, John F. (1991), Computer Graphics: Principles and Practice (2nd ed.), Reading: Addison-Wesley, ISBN 0-201-12110-7
- Matrices and Linear Transformations
- Shoemake, K. & Duff, T., Matrix Animation and Polar Decomposition,