This section studies some first order nonlinear ordinary differential
equations describing the time evolution (or “motion”) of those hamiltonian
systems provided with a first integral linking implicitly both variables to a
motion constant. An application has been performed on the Lotka--Volterra
predator-prey system, turning to a strongly nonlinear differential
equation in the phase variables.
Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the first course APMA0330
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the first course APMA0330
Return to the main page for the second course APMA0340
Return to Part III of the course APMA0340
Introduction to Linear Algebra with Mathematica
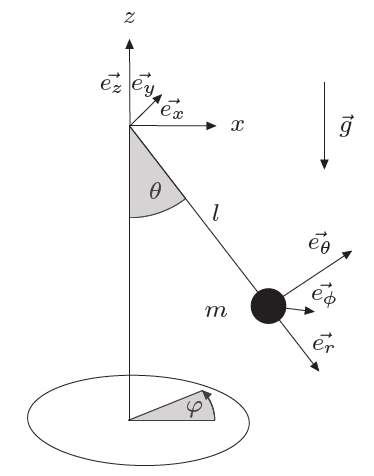
Consider a pendulum bob of mass m
hanging from the ceiling by a string of length ℓ
and free to move in two dimensions like the Foucault pendulum.
This is what is called the spherical pendulum.
The free variables are θ and
φ of spherical coordinates and the energies are given by
\[
\begin{split}
\dot{p}_{\phi} &= -\frac{\partial H}{\partial \phi} = 0, \\
&\mbox{ showing that angular momentum about the $z$-axis is conserved}
\\
\dot{p}_{\theta} &= -\frac{\partial H}{\partial \theta} =
\frac{p_{\phi}^2 \cos\theta}{m\ell^2 \sin^3 \theta} - mg\ell\,\sin\theta .
\end{split}
\]
Note that the Lagrangian is independent of the angular coordinate φ.
It follows that \( \sin^2 \theta \,\dot{\phi} \)
is a constant. As a result, we get the system of differential equations for
the spherical pendulum:
Return to Mathematica page
Return to the main page (APMA0340)
Return to the Part 1 Matrix Algebra
Return to the Part 2 Linear Systems of Ordinary Differential Equations
Return to the Part 3 Non-linear Systems of Ordinary Differential Equations
Return to the Part 4 Numerical Methods
Return to the Part 5 Fourier Series
Return to the Part 6 Partial Differential Equations
Return to the Part 7 Special Functions