Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the first course APMA0330
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the course APMA0330
Return to the main page for the course APMA0340
Return to Part II of the course APMA0330
We present some applications of differential equations of order one.
Example 1:
A 500 liter container initially contains 10 kg of salt. A brine mixture of 100 grams
of salt per liter is entering the container at 6 liter per minute. The well-mixed contents
are being discharged from the tank at the rate of 6 liters per minute.
Express the amount
of salt in the container as a function of time.
Salt is coming at the rate: 6*(0.1)=0.6 kg/min
d yin /dt =0.6 ; d yout/dt = 6x/500
Example 2:
The Solow–Swan model is an economic model of long-run economic growth set within the framework of neoclassical economics. It attempts to explain long-run economic growth by looking at capital accumulation, labor or population growth, and increases in productivity, commonly referred to as technological progress. At its core is a neoclassical (aggregate) production function, often specified to be of Cobb–Douglas type, which enables the model "to make contact with microeconomics". The model was developed independently by Robert Solow and Trevor Swan in 1956, and superseded the Keynesian Harrod–Domar model.
The neo-classical model was an extension to the 1946 Harrod–Domar model that included a new term: productivity growth. Important contributions to the model came from the work done by Solow and by Swan in 1956, who independently developed relatively simple growth models. The world is too complex to describe it inevery detail. We always need a simple but effective model in
predicting how the world works.
Solow's model fitted available data on US economic growth with some success. In 1987 Solow was awarded the Nobel Prize in Economics for his work. Today, economists use Solow's sources-of-growth accounting to estimate the separate effects on economic growth of technological change, capital, and labor.
The Solow model is based on the following assumptions:
Time variable is continuous.
Single good produced with a constant technology.
No government or international trade.
All factors of production are fully employed.
Labor force grows at constant rate n.
nitial values for capital, K0 and labor, L0 are given.
The neoclassical (Cobb--Douglas) aggregate production function function is assumed to be
where t denotes time, 0 < α < 1 is the elasticity of output with respect to capital, and Y( t ) represents total production. A refers to labor-augmenting technology or “knowledge”, thus A L represents effective labor. All factors of production are fully employed, and initial values A( 0 ), K( 0 ), and L( 0 ) are given. The number of workers, i.e. labor, as well as the level of technology grow exogenously at rates n n and g, respectively:
Solow, Robert M. (February 1956). "A contribution to the theory of economic growth". Quarterly Journal of Economics. 70 (1): 65–94. doi:10.2307/1884513.
Solow, Robert M. (1957). "Technical change and the aggregate production function". Review of Economics and Statistics. 39 (3): 312–320. doi:10.2307/1926047.
Swan, Trevor W. (November 1956). "Economic growth and capital accumulation". Economic Record. 32 (2): 334–361. doi:10.1111/j.1475-4932.1956.tb00434.x.
■
Vertical Motion
It is known from elementary physics
that, in the absence of air friction, a ball thrown up from the ground
into earth's atmosphere with initial speed v0 would attain a
maximum altitude of \( v_0^2 /(2g) .\) In this case the return time is
\( 2\, v_0 /g, \) independent of the ball's mass. Here g is the
acceleration due to gravity. If the ball is thrown up from
altitude y0 (which we later assume to be zero), then the time T0
spent traveling is given by
\[
\left\{
\begin{array}{c}
\mbox{travel time with no air resistance} \\
\mbox{when thrown from height $y_0$}
\end{array}
\right\}
\ = \
T_0 \ =\ \frac{v_0 + \sqrt{v_0^2 +2\, y_0\, g}}{g}
\]
The presence of air influences the ball's motion: it experiences
two forces acting on it---the force of gravity and the air resistance force.
Let's define the symbol T as follows:
\[
\left\{
\begin{array}{c}
\mbox{travel time {\it with} air resistance} \\
\mbox{when thrown from height $y_0$}
\end{array}
\right\}
\ = \ T
\]
Without air resistance, the object travels farther up than with air
resistance. On the way down, without air resistance the object
travels a larger distance, but it also gathers more speed.
A natural question is, which travel time (with air
resistance vs. no air resistance) is larger? Also, it is of interest
to find the maximum altitude \( y_{\max} \) of the ball, the time
Tmax to reach maximum altitude, and the time
\( T_{\text{down}} \) to return back from ymax. Therefore, \( T_{\max} +
T_{\text{down}} = T_{\text{total}} \) (the total time the ball spent in
the air). The landing velocity is denoted by \( v_{\ell} . \)
Example 3:
Air resistance is the force that acts in the direction opposite to the
motion of an object through air.
Air resistance depends on the shape, material, and orientation of the object,
the density of the air, and the object's relative speed.
We would like to think that there is a nice formula for the air resistance
in terms of speed and other variables. Such a formula would help
in making calculations and predicting various quantities.
A starting point for obtaining such a formula is our everyday experience.
Based on our experience, a reasonable assumption to
make\footnote{Our intuition based on everyday experience is
limited to a small range of conditions.
This may lead to erroneous assumptions.
It has been observed that,
under suitable conditions,
the magnitude of the air resistance is proportional to a power of the
speed s=|v|:
\begin{equation}
\tag{M}
F \propto s^p, \qquad \mbox{which may be written as}\qquad F(v) = k \, |v|^p.
\end{equation}
Here v is velocity, and both k and p are positive constants. For very
small objects, such as a speck of dust (about 1 micrometer or
0.001mm), p=1 seems to give a reasonable formula for the air resistance.
For larger, human scale objects moving at relatively large speed,
p=2 works better. Therefore, the magnitude of the air resistance F
as a function of velocity v is assumed be given by formula (M).
The air resistance force depends on the velocity (v) of the object at
time t, so let us denote this force with the symbol F(v). Note
that the air resistance, force F(v), always acts in the direction
opposite to the motion. Therefore, F(v) acts in the down (negative)
direction when the ball is moving up, and it acts in the up (positive)
direction when the ball is moving down.
If we measure the displacement y = y(t) vertically upwards from the
ground, then \( v= {\text d}y/{\text d}t = \dot{y} \) is the velocity of
the object. Newton's law of motion for the ball on the way up
gives the differential equation
To find an equation for $v_{\ell}$, the landing velocity, we rewrite
\refeq{vert.3}
as \( {\text d}\,t = - {\text d}v/(g +F(v)/m) \)
and integrate both sides from t=0 and v = v0 to \( t=T_{\max} \) and
v=0. Here \( T_{\max} \) is the time to reach the maximum altitude
\( y_{max} , \) which is also the time to have velocity v=0.
We obtain,
This equation gives T as a function of
\( v_\ell . \)
The next step is to find an equation for \( v_\ell . \)
To find an equation for $v_\ell$, we rewrite \refeq{vert.3}
as \( v\,{\text d}t = -v\, {\text d}v/(g +F(v)/m) \)
and integrate
both sides from t=0 and v = v0 to \( t=T_{\max} \) and v=0.
Here \( T_{\max} \) is the time to reach the maximum altitude
\( y_{\max} , \) which is also the time to have velocity v=0.
Using the fact that the integral of the velocity is the displacement,
we obtain,
We would like to
determine the ratio:
\[
\gamma = T/T_0 = Tg/ \left( v_0 + \sqrt{v_0^2 +2 x_0 g}\right),
\]
where T time in air with air resistance and T0 is the time in air
without air resistance.
For a tennis ball thrown upward with the initial velocity v0 =10,
it is possible to find x0 that γ > 1 when p=0.9. In
general, it is unknown for what values of p< 1, x0, and v0 we can
achieve γ > 1.
Example 4:
We consider a model of falling object, say a tennis ball, to
a flat surface that moves up and down periodically. Using vertical axis
directed upward, we denote v(t) as the velocity of the ball and y(t)
as its position/height at time t.
It has been observed that, under suitable conditions,
the magnitude of the air resistance is proportional to the power of speeds=|v|:
\begin{equation}
\tag{M}
F \propto s^p, \qquad \mbox{which may be written as}\qquad F(v) = k \, |v|^p.
\end{equation}
Note
that the air resistance force F(v) always acts in the direction
opposite to the motion. Therefore, F(v) acts in the down (negative)
direction when the ball is moving up, and it acts in the up (positive)
direction when the ball is moving down.
Suppose that initially at t=0, the ball of mass m is dropped from the
altitude \( y=h > 1 \) without initial velocity. At the same time, it is assumed
that the floor starts moving according to the formula \( z= \sin \omega t. \)
When elastic ball hits a hard flat surface, it bounces back with the same
velocity.
It is assumed that the collision is totally elastic, so the ball loses
no kinetic energy in the collision, and its speed after collision is the same
as before the collision. At this point, ignore the time needed for the ball
to be deformed during collision before fully rebounded and has lifted off
from the surface instantly. Hence the ball can be treated as a rigid body with
negligible deformation during impact.
After collision, the ball climbs up until its velocity becomes zero, and then
the ball falls vertically downward under the influence of gravity, hits the
the moving floor, and bounces back.
Derivation of a differential equation
Newton's law of motion for the ball on the way down is
Since Mathematica provides the approximate value of T1 to be
0.4716548296910227 for h0 = 2, we denote it by T1. The velocity \( v(t) = \omega\,\cos (\omega \,t) \)
of the floor/racket at T1 is \( vv(T1) = V1 \approx 0.279386 \) positive, which
indicate that the racquet is moving up. So we add 80% of its velocity to the ball.
On the second stage, the ball bounced up with the initial velocity
\( V1 = kk*vv(T1) + \sqrt{\frac{gm}{k}} \tanh \left( \sqrt{\frac{gk}{m}}\,T1 \right) \approx 4.158 \)
and from the position \( Y1 = \sin \left( \omega\,T1 \right) \approx
0.996038. \) Here kk is the coefficients of elastic damping of the racket, which we set to be 0.8.
Therefore, we need to solve two initial value problems:
Then we find time (which we denote as T3) when the ball meets the racket:
y3[t_] = Y2 - m/k*Log[Cosh[Sqrt[g*k/m]*(t - T2)]]
T3 = t /. FindRoot[y3[t] == Sin[omega*t], {t, 2}]
1.6703817057459314
The velocity of the racket at time contact is positive and we transfer 80% of its speed to the ball.
vv[T3]
1.6024422817741188
The position of the ball at t=T2 will be \( y(T2) \approx
1.822 . \) After T2, the ball starts falling down and we need to
solve the initial value problems:
At \( t= T3 \approx 1.67 , \) the ball meets the racket and starts
climbing up. So its velocity should be the solution of the
following initial value problem:
where T4 is time where the velocity is zero, and \( V3 = kk*\sin (\omega\,T3) +
\sqrt{\frac{gm}{k}} \tanh \left( \sqrt{\frac{gk}{m}}\,T3 \right) \approx 4.69381 . \) Mathematica provides the numerical values:
Next, we check whether the racket hits the ball from below
TT4 = t /. FindRoot[y4[t] == Sin[omega*t], {t, 2}]
2.05476
Since this number TT4 is less than previously found T4, we conclude that the racket hits the ball on its way up.
At this moment TT4, we define the position and the velocity of the ball:
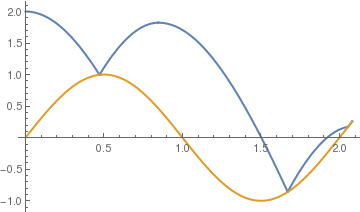
The time interval where the ball oscillates over the racket is not enough to show on the picture because time intervals are too small.
Graphs of sin (π t) and position of y(t).
Claude Perrault
Sir Isaac Newton
Christiaan Huygens
A tractrix (from the Latin verb trahere "pull, drag"; plural: tractrices) is the curve along which an object moves,
under the influence of friction, when pulled on a horizontal plane by a line segment attached to a tractor (pulling)
point that moves at a right angle to the initial line between the object and the puller at an infinitesimal speed.
It is therefore a curve of pursuit. It was first introduced by
Claude Perrault in 1670, and later
studied by Isaac Newton (1676) and Christiaan Huygens (1692).
Claude Perrault (1613 -- 1688) was a French architect, best known for his participation in the design of the east
façade of the Louvre in Paris. He also achieved success as a physician and anatomist, and as an author, who wrote
treatises on physics and natural history. Perrault was born and died in Paris. Aside from his influential architecture, he became well known for his
translation of the ten books of Vitruvius, the only surviving Roman work on architecture, into French, written at
the instigation of Colbert, and published, with Perrault's annotations, in 1673. His treatise on the five classical
orders of architecture followed in 1683. As physician and natural philosopher with a medical degree from the
University of Paris, Perrault became one of the first members of the French Academy of Sciences when it was founded
in 1666.
Sir Isaac Newton (1642 -- 1726/27) was an English mathematician, astronomer, theologian and physicist (described
in his own day as a "natural philosopher") who is widely recognized as one of the most influential scientists of
all time and a key figure in the scientific revolution. His book Philosophiae Naturalis Principia Mathematica
("Mathematical Principles of Natural Philosophy"), first published in 1687, laid the foundations of classical
mechanics. Newton also made pathbreaking contributions to optics, and he shares credit with Gottfried Wilhelm
Leibniz for developing the infinitesimal calculus.
Christiaan Huygens (Latin: Hugenius; 1629 -- 1695) was a prominent Dutch mathematician and scientist.
He is known particularly as an astronomer, physicist, probabilist and horologist.
Huygens was a leading scientist of his time. His work included early telescopic studies of the rings of Saturn and
the discovery of its moon Titan, the invention of the pendulum clock and other investigations in timekeeping.
He published major studies of mechanics and optics (having been one of the most influential proponents of the wave
theory of light), and pioneered work on games of chance.
Example 5:
In order to plot tractrix curve, use the following code:
sol = DSolve[{y'[x] == -Sqrt[a^2 - x^2]/x, y[a] == 0}, y, x]
Manipulate[
Plot[-Sqrt[a^2 - x^2] + a Log[a] - a Log[a^2] - a Log[x] +
a Log[a^2 + a Sqrt[a^2 - x^2]], {x, 0, 20}, PlotRange -> All], {a,
1, 20}]
Example 6::
If a person becomes susceptible to a desease after recovering from it (like gonorrhea, meningitis, and streptococcal sore throat), then the percent of persons susceptible to becoming infected with the desease, S(t), and the percent of people in the population infected with the desease, I(t), can be modeled by the system of differential equations
As usual, we use dot to represent the derivative with respect to time variable t. The above model is called an SIS model (susceptible-infected-susceptible model) with vital dynamics (where μ and γ represent the birth and death rates) because once an individual has recovered from the desease, the individual again becomes susceptible to the desease. The λSI term is understood as follows: An average infected individuals makes contact sufficient to infect λN (here N is total population) others per unit time. Also, the probability that a given individual that each infected individual comes in contact with is susceptible is S/N. Thus, each infected individual causes \( \left( \lambda\,N \right) \left( S/N \right) = \lambda\,S \) infections per unit time. Therefore, I infected individuals cause a total number of infections per unit time of λSI. The γI term is even simpler to understand: γ is the fraction of infected individuals who recover (and re-enter the susceptible class) per unit time.
Using the relation \( S+I =1 , \) we can eliminate one dependent variable and reduce the problem to an ordinary differential equation
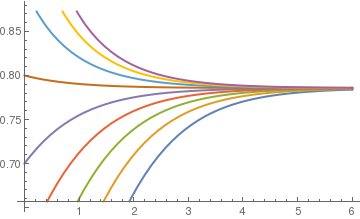
For disease to spread, the derivative \( \dot{I} >0 \) must be positive. Since the above equation is of Bernoulli type, Mathematica can find its general solution without a problem.
The same graph could be obtained with the aid of Table to define the list of initial conditions, which we call inits, and then use Map to apply the function graph to the list of numbers inits. The result is a list of nine graphics objects that we name toshow.
Example 7:
Forms of a given element with different numbers of protons, neutrons, and its nuclear energy are called nuclides. Some nuclides are not stable. For example, potassium-40 (40K) naturally very clowly decays to reach argon-40 (40Ar). This decay was first observed, but not understood, by the Nobel laureateHenri Becquerel (1852--1908) in 1896. However, Marie Skłodowska Curie (1867--1934) began studying this decay in 1898, cointed out it as radioactivity, and discovered the radioactive substances polonium and radium.
Given a sample of 40K of sufficient size, after \( 1.2 \times 10^{9} \) years approximately half of the sample will have decayed to 40Ar. The half-life of a nuclide is the time for half the nuclei in a given sample to decay.
Suppose you know that the half-life of polonium-209 is about 125 years. What percent of the original amount of 209Po remains after 75 years?
Let y0 represent te original amount of polonium-209 that is present and y(t) denote the amount of 209Po after t years. Then y(t) is the solution to the following initial value problem:
\[
\dot{y} = -r\,y(t), \qquad y(0) = y_0 ,
\]
given that \( y(125) = y_0 /2 . \) Using separation of variables, we find the solution of the given IVP:
Return to Mathematica page
Return to the main page (APMA0330)
Return to the Part 1 (Plotting)
Return to the Part 2 (First Order ODEs)
Return to the Part 3 (Numerical Methods)
Return to the Part 4 (Second and Higher Order ODEs)
Return to the Part 5 (Series and Recurrences)
Return to the Part 6 (Laplace Transform)
Return to the Part 7 (Boundary Value
Problems)