Although physical phase space can extend to thousands of dimensions, our minds are incapable of thinking even in five dimensions—we have no ability to visualize such things. It is impossible to do physics in high dimensions without having the right tools and symbols with which to work. Cross product is an important tool applied only in three dimensional vector space. In Euclidean space, a cross product is related to areas of parallelograms and volumes of parallelepipeds.
Thus, it opens the door of high dimensional math and physics, including tensors and wedge products.
In 1881, Josiah Willard Gibbs (1839--1903), and independently Oliver Heaviside (1850--1925), introduced the notation for both the dot product and the cross product using a period (a • b) and an "×" (a × b), respectively, to denote them.
In 1877, to emphasize the fact that the result of a dot product is a scalar while the result of a cross product is a vector, William Kingdon Clifford (1845--1879) coined the alternative names scalar product and vector product for the two operations. These alternative names are still widely used in the literature.
Vector or Cross product
It is well-known that a vector space can be equipped with a product operation (besides vector addition) only for dimensions 1 and 2. The cross product is a successful attempt to implement the product in a three-dimensional vector space, but without the commutative property of multiplication. On the other hand, the outer product assigns a matrix to two vectors of arbitrary size.
For any two vectors in ℝ³, \( \displaystyle {\bf a} = \left[ a_1 , a_2 , a_3 \right] \) and \( \displaystyle {\bf b} = \left[ b_1 , b_2 , b_3 \right] , \) their
cross product is the vector (written in a column form for convenience)
Here \( \displaystyle \hat{\bf e}_1 , \ \hat{\bf e}_2 , \ \hat{\bf e}_3 \ \) are unit vectors in ℝ³ that are also usually denoted by i, j, and k, respectively.
Clear[e, e1, e2, e3];
e = {e1, e2, e3};
a = {a1, a2, a3};
b = {b1, b2, b3};
MatrixForm[{e, a, b}];
Det[{e, a, b}]
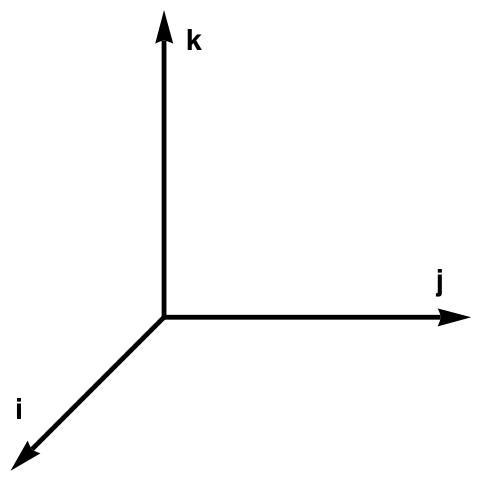
Cross-product of two vectors together with these vectors form so called right-handed system.
Three vectors, u, v, w, form a right-handed system if when you extend the thumb of your right hand
in the direction of u and your index finger in the direction of v, your relaxed middle finger points roughly in the direction of w.
The special basis vectors i = (1, 0, 0), j = (0, 1, 0), and k = (0, 0, 1) form a right-handed system in ℝ³. Thus, if the thumb of your right hand points along the x-axis and your index finger points
along the y-axis, your middle finger should point along the z-axis. When all three vectors lie in a plane, then we say that the vectors are coplanar. In this case, the system is
neither right-handed nor left-handed.
θ is the angle between a and b in the plane containing them (hence, it is between 0 and π);
∥ x ∥ is the Euclidean norm, so \( \displaystyle \| {\bf x} \| = \| (x_1 , x_2 , x_3 )\| = \sqrt{x_1^2 + x_2^2 + x_3^2} ; \)
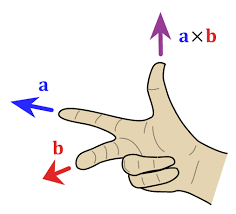
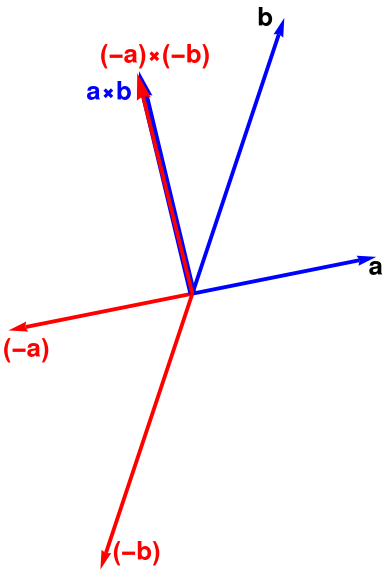
n is a unit vector perpendicular to the plane containing a and b, with direction such that the ordered set (a, b, n) is positively-oriented. Conventionally, direction of n is given by the right-hand rule, where one simply points the forefinger of the right hand in the direction of a and the middle finger in the direction of b. Then, the vector n is coming out of the thumb (see the adjacent picture).
It is orthogonal to both a and b.
The vectors a, b, and a × b, in that order, form a right-handed system.
Figure 3: Right hand rule.
Figure 4: Cross product.
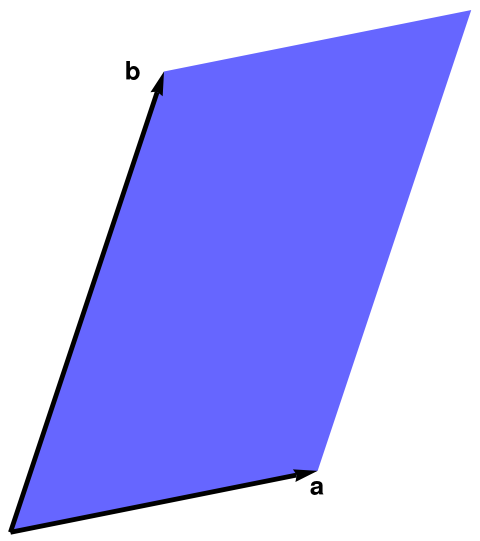
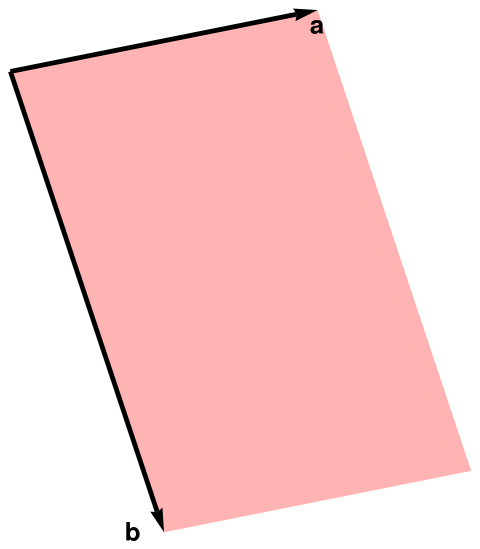
We note that the length of the cross product, ∥ a × b ∥ = ∥ a ∥ ∥ b ∥ sin(θ) , given by the formula \eqref{EqCross.2}, is the area of the
parallelogram determined by a and b.
We plot with Mathematica cross product of two vectors using DynamicModule command so you can see the value of cross product, which is the area of parallelogram (in blue for the acute angle, pink for the obtuse angle) formed by two given vectors. You can manipulate the plot in Mathematica by dragging the arrowheads.
Example 1:
Let us consider two vectors (that we write as column vectors):
\[
{\bf a} = \begin{pmatrix} 1 \\ 2 \\ 0 \end{pmatrix} \qquad \mbox{and} \qquad {\bf b} = \begin{pmatrix} -1 \\ \phantom{-}1 \\ \phantom{-}1 \end{pmatrix}
\]
Although we can use Eq.(1) to determine components of their cross product, we dedicate this job to Mathematica:
a = {1, 2, 0} ;
b = {-1, 1, 1};
c = Cross[a, b]
{2, -1, 3}
Or, equivalently, Mathematica has an operator for Cross
a\[Cross]b
{2, -1, 3}
\[
{\bf c} = {\bf a} \times {\bf b} = \begin{pmatrix} 1 \\ 2 \\ 0 \end{pmatrix} \times \begin{pmatrix} -1 \\ \phantom{-}1 \\ \phantom{-}1 \end{pmatrix} = \begin{pmatrix} \phantom{-}2 \\ -1 \\ \phantom{-}3 \end{pmatrix} .
\]
The length of cross product of two vectors is equal to the area of the parallelogram spanned on these vectors; therefore, we have
\[
| {\bf c} | = | {\bf a} \times {\bf b} | = \sqrt{2^2 + (-1)^2 + 3^2} = \sqrt{14} .
\]
Norm[%]
Sqrt[14]
N[Norm[c]]
3.74166
Norm[a]
Sqrt[5]
Norm[b]
Sqrt[3]
para = Graphics[{Lighter[Purple, 0.1],
Parallelogram[{0, 0}, {{1, 0.2}, {-0.5, 1.5}}]}];
Labeled[Graphics[para, Axes -> True, Ticks -> True,
Epilog ->
Text["Area of parallelogram:\n= Determinant{v,w}\n= Length of the
cross product{v,w}\n= 1", {.65, .85}]], "Area of Parallelogram"]
Figure E1.1: Area of parallelogram.
Area[para]
1.
{Norm[a], Norm[b]}
{Sqrt[5], Sqrt[3]}
Since norms of these two vectors are
\[
\| {\bf a} \| = \sqrt{5} \qquad \mbox{and} \qquad \| {\bf b} \| = \sqrt{3} ,
\]
Det[{{1., 0.5}, {0.27, 1.135}}]
1.
we find angle between these two vectors:
\[
\theta = \mbox{arccos} \left( \frac{\sqrt{14}}{\sqrt{15}} \right) \approx \mbox{arccos} \left( 0.966092 \right) \approx 0.261157 .
\]
ArcCos[Sqrt[14]/Sqrt[15]] // N
0.261157
N[Sqrt[14/15]]
0.966092
N[ArcCos[Sqrt[14/15]]]
0.261157
End of Example 1
■
Despite that the cross product is identified uniquely by two entries, there is something very peculiar about the vector u × v. If u and v are orthogonal unit vectors, then the vectors u, v, u × v form a right-handed coordinate system. But if R ∈ ℝ3×3 is the linear transformation (whch is 3×3 matrix with real entries) that mirrors vectors in the u, v plane, then { Ru, Rv, Ru×v } = { u, v, −u×v } forms a left-handed coordinate system. In general, the cross product obeys the following identity under matrix transformation:
where M is a 3×3 matrix and M−T is the transpose of the inverse matrix.
Thus, cross product u×v is not really transformed as a vector. This anomaly should alert us to the fact that cross product is not really a true vector. In fact, cross product is transformed more like a tensor than a vector.
where p₁, p₂, and p₃ are row vectors in matrix P. This matrix (as any 3×3 matrix) defines a linear transformation in ℝ3×1 by multiplication from the left. Then a natural question arises whether it is possible to express a transformed cross product
This expression for diagonal matrix tells us that there is no simple formula for vector product (Pv) × u in terms of v × u because vector product is a bilinear transformation ℝ³ × ℝ³ ↦ ℝ³. On the other hand, if we fix vector u, then cross product becomes a linear transformation
The null space of T is the line through the origin spanned by vector u and its image is the plane through the origin orthogonal to u.
One of the main motivations to use cross product comes from classical mechanics: A torque τ about a point due to a force F
acting at another point at distance r is expressed through cross product: τ = r × F.
\begin{equation} \label{EqCross.4}
\varepsilon_{i,j,k} = \begin{cases}
\phantom{-}0 , & \quad\mbox{if any two labels are the same},
\\
-1, & \quad \mbox{if }i,\, j,\,k \mbox{ is an odd permutation of 1, 2, 3}, \\
\phantom{-}1 , & \quad \mbox{if } i,\, j,\,k \mbox{ is an even permutation of 1, 2, 3}.
\end{cases}
\end{equation}
The Levi-Civita symbol εijk is a tensor of rank three and is anti-symmetric on each pair of indexes.
The determinant of a matrix A with elements 𝑎ij can be written in term of εijk
Given two space vectors, a and b, we can find a third space vector c, called
the cross product of a and b, and denoted by c = a × b. The magnitude
of c is defined by |c| = |a| |b| sin(θ), where θ is the angle between a and b.
Levi-Civita symbol
The direction of c is given by the right-hand rule: If a is turned to b (note the order in which a and b appear here) through the angle between a and b, a (right-handed) screw that is perpendicular to a and b will advance in the
direction of a × b. This definition implies that
Using these properties, we can write the vector product of two vectors in terms
of their components. We are interested in a more general result valid in other
coordinate systems as well. So, rather than using x, y, and z as subscripts for
unit vectors, we use the numbers 1, 2, and 3. In that case, our results can
also be used for spherical and cylindrical coordinates which we shall discuss
shortly.
Example 3:
We use Mathematica to prove the following properties of cross product. Although Matheatica is a computer algebra system, so it allows to use algebraic expressions for manipulations, we illustrate its capability on numerical example. Therefore, we utilize
the rows of the following vectors, a, b, and c used in the previous Example:
TrueQ[a\[Cross](b\[Cross]c) == b (c . a) \[Minus] c (a . b)]
True
(a × b) × c = b(c • a) − a(b • c).
TrueQ[(a\[Cross]b)\[Cross]c == b (c . a) \[Minus] a (b . c)]
True
End of Example 3
■
The property of cross product,
a × (b × c) = b(c • a) − c(a • b), discussed in the previous example, can be used to prove the identity involving the gradient operator ∇:
Here f = f(x) = (f₁, f₂, f₃) is a 3-dimensional vector function depending on three variables, x ∈ ℝ³, and \( \displaystyle \nabla = \left( \frac{\partial}{\partial x} , \frac{\partial}{\partial y} , \frac{\partial}{\partial z} \right) \) is the gradient operator. It is common to use a shortcut: ∇ =
∂xi + ∂yj +
∂zk = (∂x, ∂y,
∂z). Then
Actually, there does not exist a cross product vector in space with more than 3 dimensions.
The fact that the cross product of 3 dimensions vectors gives an object which also has 3 dimensions
is just pure coincidence.
Theorem 4:
The cross product in 3 dimensions is actually a tensor of rank 2 with 3 independent coordinates.
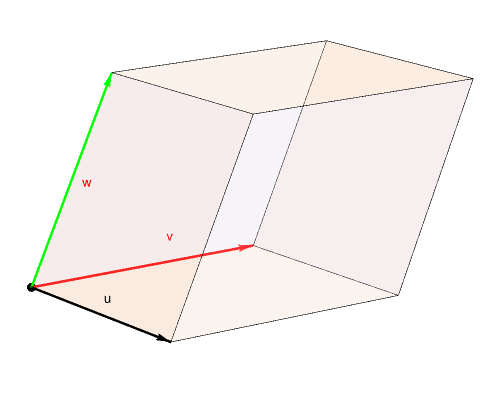
A parallelepiped determined by three vectors u, v, and w consists of the set of points of the form
\[
r{\bf u} + s{\bf v} + t{\bf w} ,
\]
where r, s, t are real numbers between 0 and 1, inclusive. The parallelepiped is a 3-dimensional
body bounded by parallelograms as shown in the following picture.
Since the
base of the parallelepiped is the parallelogram determined by the vectors u and v, we find is volume, which cross product u × v, as the product of the area and the height, which is projection of ∥ w ∥ on the perpendicular line:
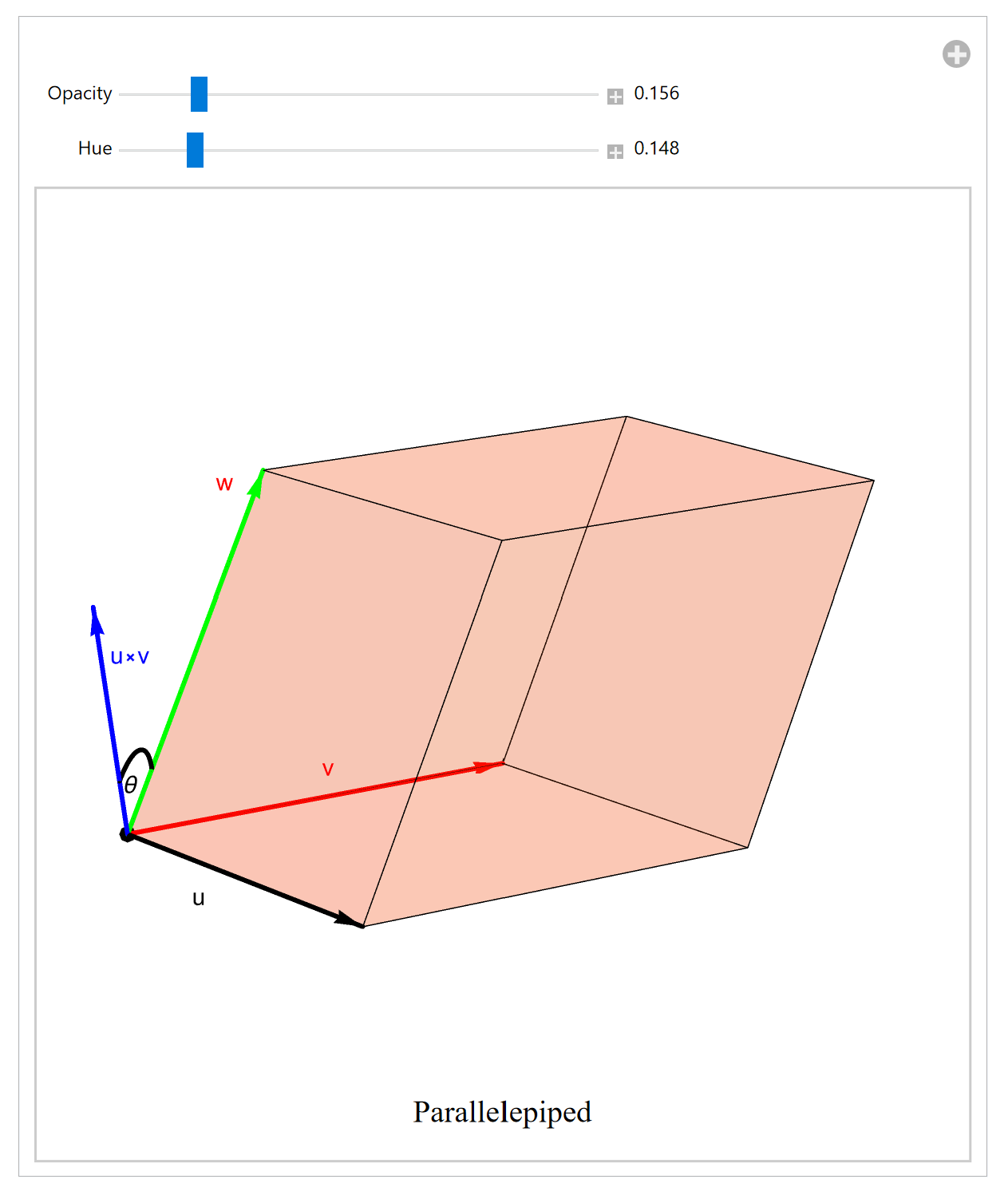
Theorem 5:
Let a, b, and c be three vectors in ℝ³ that define a parallelepiped. The box product (a × b) • c is equal to:
the volume of the parallelepiped, if a, b, and c form a right-handed system;
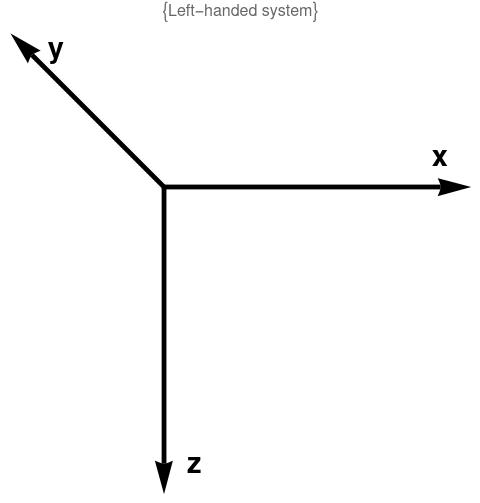
the negative of the volume of the parallelepiped, if a, b, and c form a Left-handed system.
In any case, the volume of the parallelepiped can be computed as the absolute value of the box product, given by |(a × b) • c|.
Corollary 1:
The box product (a × b) • c is
positive, if a, b, and c form a right-handed system;
negative, if a, b, and c form a left-handed system;
zero, if a, b, and c are coplanar.
Example 4:
From the definition of the vector product, it follows that
\[
\left\vert {\bf a} \times {\bf b} \right\vert = \mbox{ area of the parallelogram defined by} \quad {\bf a} \mbox{ and } {\bf b} .
\]
So we can use Eq.\eqref{EqCross.6} to find the area of a parallelogram defined by two
vectors directly in terms of their components. For instance, the area defined by
a = (1, −1, 2) and b = (−2, 3, 1) can be found by calculating their vector product
Example 5:
The volume of a parallelepiped defined by three non-coplanar vectors a, b, and c is given by \( \displaystyle \left\vert {\bf a} \bullet \left( {\bf b} \times {\bf c} \right) \right\vert . \) The absolute value is taken to ensure the positivity of the area. In terms of components we have
Example 6:
Which of the following systems of vectors u, v, w is right-handed? Which one is left-handed? Which
one is coplanar?
[1, 2, 0], [0, 1, 1], [1, -1, 1]
[0, 1,2], [-1,2,2], 0, 1, 1]
[1, 1, 2], [1, 2, 2], [0, 1, 1]
Solution:
When the Box Product (Cross[u, v].w) is positive, the system is right handed; negative, left handed; zero, coplanar, thus, entering a system into the following function as a list of lists, we have:
box[system_ : List] :=
If[Cross[system[[1]], system[[2]]] . system[[3]] > 0,
Print["The system is right handed"],
If[Cross[system[[1]], system[[2]]] . system[[3]] < 0,
Print["The system is left handed"],
Print["The system is coplanar"]]];
box[{{1, 2, 0}, {0, 1, 1}, {1, -1, 1}}]
The system is right handed
box[{{1, 1, 2}, {1, 2, 3}, {0, 1, 1}}]
The system is coplanar
box[{{0, 1, 2}, {-1, 2, 2}, {0, 1, 1}}]
The system is left handed
End of Example 6
■
Theorem 6:
Let a and b be two vectors in ℝ³. Then
(a × b) • c = a • (b × c).
This follows from observing that both (a × b) • c and a • (b × c) compute the same box product,
i.e., they either both give the volume of the parallelepiped or they both give the negative of the volume.
Coordinates are “functions” that specify points of a space. The smallest
number of these functions necessary to specify a point P is called the dimension of that space.
There are
three widely used orthogonal coordinate systems in a three-dimensional vector space ℝ³: Cartesian (x(P), y(P), z(P)), cylindrical (r(P), θ(P), z(P)), and spherical (ρ(P), θ(P), φ(P)). The latter φ(P) is called
the azimuth or the azimuthal angle of P, while θ(P) is called its polar angle.
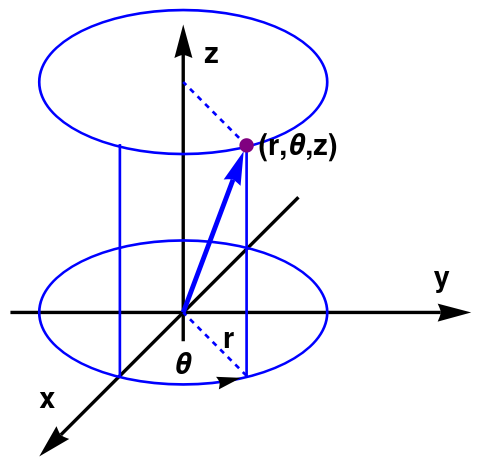
Cylindrical coordinates
A cylindrical coordinate system in ℝ³ is a marriage of polar coordinates on the plane ℝ² and regular applicate direction from the Cartesian one.
A cylindrical coordinates (r ≥ 0, 0 ≤ θ < 2π, −∞ < z < ∞) of a point in ℝ³ are defined by the equations:
\[
\begin{split}
x &= r\,\cos\theta , \\
y &= r\,\sin\theta , \\
z &= z , \end{split} \qquad\quad r = +\sqrt{x^2 + y^2} , \qquad \theta = \begin{cases}
\arctan\left( \frac{y}{x} \right) , & \quad \mox{if } x > 0, \\
\arctan\left( \frac{y}{x} \right) + \pi , & \quad \mbox{if } x < 0
\mbox{ and } y \ge 0 , \\
\arctan\left( \frac{y}{x} \right) - \pi , & \quad \mbox{if } x < 0 \mbox{ and } y < 0, \\
\frac{pi}{2} \cdot \frac{y}{|y|} , & \quad \mbox{if } x = 0 \mbox{ and } y \ne 0 , \\
\mbox{indetermined} , & \quad \mbox{if } x= 0 \mbox{ and } y = 0.
\end{cases}
\]
Variable r is the radius of the cylinder passing through point P(r, θ, z) or the radial distance distance from the applicate (z-axis); θ is called azimuthal angle and it is measured from the abscissa (x-axis) in the xy-plane, and z is the same as in the Cartesian system. A vector v (with endpoint P) in cylindrical coordinates can be written as
where \( \displaystyle \hat{\bf r}, \ \hat{\theta}, \ \hat{\bf z} \) are nit vectors in r, θ, and z directions, respectively. They are pointed in direction of increasing of corresponding coordinates. Note that the radial unit vector \( \displaystyle \hat{\bf r} (\theta ) \) depends on angle θ.
The unit vectors in the cylindrical coordinate system are functions of position.
It is convenient to express them in terms of unit vectors of the rectangular coordinate system that are not themselves functions of position.
where \( \displaystyle \hat{\bf r}_1 = \hat{\bf r} (\theta_1 ) \) is the unit radial vector for point (r₁ , θ₁) and \( \displaystyle \hat{\bf r}_2 = \hat{\bf r} (\theta_2 ) \) is the unit radial vector towards point (r₂ , θ₂). These radial vectors are applied at two different points, so their cross product has no natural (simple) way to be specified.
The gradient operator in cylindrical coordinates is given by
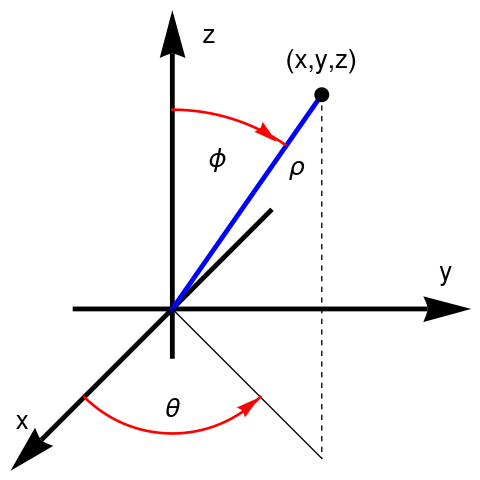
A spherical coordinate system is a coordinate system for three-dimensional space ℝ³, where the position of a point is specified by three numbers: the radial distance of that point from a fixed origin; its zenith angle (or inclination angle or polar angle) measured from an applicat direction; and the azimuthal angle of its orthogonal projection on a reference plane that passes through the origin and is orthogonal to the fixed axis, measured from another fixed reference direction on that plane.
The spherical coordinates (ρ, θ, ϕ) are related to the Cartesian coordinates (x, y, z) by
where the radial, azimuth, and zenith angle coordinates are taken as ρ, θ, and ϕ, respectively.
As usual, the location of a point (x, y, z) is specified by the distance ρ of the point from the origin, the angle ϕ between the position vector and the z-axis, the polar angle measured down from the north pole, and the azimuthal angle θ from the x-axis to the projection of the position vector onto the xy plane, analogous to longitude in earth measuring coordinates:
\[
\rho = \sqrt{x^2 + y^2 + z^2} \geqslant 0 \qquad\mbox{and} \qquad \phi = \mbox{arccos} \frac{z}{\rho} = \begin{cases}
\arctan \frac{\sqrt{x^2 + y^2}}{z} , & \mbox{ if } z > 0, \\
\pi + \arctan \frac{\sqrt{x^2 + y^2}}{z} , & \mbox{ if } z < 0, \\
+ \frac{\pi}{2} , & \mbox{ if } z = 0 \mbox{ and } xy \ne 0 , \\
\mbox{undefined} , & \mbox{ i } x=y=z=0 .
\end{cases}
\]
While zenith angle is take from the closed interval 0 ≤ ϕ ≤ π, the azimuth angle belongs to semiclosed interval 0 ≤ θ < 2π.
\[
\theta = \mbox{sign}(y)\,\arccos \frac{x}{\sqrt{x^2 + y^2}} = \begin{cases}
\arctan \left( y/x \right) , & \ \mbox{ if} \quad x > 0 , \\
\arctan \left( y/x \right) + \pi , & \ \mbox{ if} \quad x < 0 \mbox{ and } y \ge 0, \\
\arctan \left( y/x \right) - \pi , & \ \mbox{ if} \quad x < 0 \mbox{ and } y < 0, \\
+\frac{\pi}{2} , & \ \mbox{ if} \quad x = 0 \mbox{ and } y > 0, \\
-\frac{\pi}{2} , & \ \mbox{ if} \quad x = 0 \mbox{ and } y < 0, \\
\mbox{undefined}, & \ \mbox{ if} \quad x = 0 \mbox{ and } y=0.
\end{cases} .
\]
A position vector in spherical coordinates is described in terms of the radial parameters ρ, which depends on the zenith (or polar)
angle ϕ and the azimuthal angle θ as follows:
However, these formulas are of little help for determinantion of cross product in spherical coordinates because unit vectors depend on location of the given two vectors. Therefore, the rules above are not directly applicable for cross product.
Suppose that two vectors are given in Cartesian and spherical coordinates
sina = Sqrt[1 - (Sin[p1]*Sin[p2]*Cos[t1 - t2] - Cos[p1]*Cos[p2])^2]
0.895806
As you see, we used minus when evaluated cosine function because z-coordinate of a × b is negative. We compare sin(α) evaluated with trigonometric functions above with the definition followed from Cartesian form:
N[Sqrt[65]/9]
0.895806
We verify formula (8a) for radial distance
9*sina
8.06226
which gives the value √65 ≈ 8.06226. Finally, we check the formula for ϕab
ArcCos[Sin[p1]*Sin[p2]*Sin[t2 - t1]/sina]
2.41015
This value is equal to the "exact" value 2.410 evaluated with the aid of arctangent function.
End of Example 8
■
Mathematica has three multiplication commands for vectors: the dot (or inner) and outer products (for arbitrary vectors), and
the cross product (for three dimensional vectors).
The cross product can be done on two vectors. It is important to note that the cross product is an operation that is only functional in three dimensions. The operation can be computed using the Cross[vector 1, vector 2] operation or by generating a cross product operator between two vectors by pressing [Esc] cross [Esc]. ([Esc] refers to the escape button)
Cross[{1,2,7}, {3,4,5}]
{-18,16,-2}
Applications in Physics
The simplest physical model of a vector product is the moment M of a
force F about a point 0 (the origin), defined as
\[
{\bf M} = {\bf r} \times {\bf F} ,
\]
where r is the vector joining the origin to the initial point of F. The positive direction
of the vector M depends on the choice of the coordinate system, like the
direction of the angular velocity vector due to the action of the moment M.
An electric charge e in an electric field E experiences a force
\[
{\bf F}_e = e\,{\bf E} ,
\]
while an electric charge e moving with velocity v in a magnetic field H experiences a force
where c is the velocity of light.9 Hence, the total force experienced by an
electric charge e moving with velocityv in an electromagnetic field with electric
field E and magnetic field H is given by
This work goes into changing the kinetic energy U
of the moving charge. The magnetic field does no work because the force Fm due to the magnetic
field is perpendicular to v at every instant. Hence the work done by the
electromagnetic field is due to the electric field alone and is done at the rate
The magnetic field changes the direction of the charge's velocity, but not the
magnitude of the velocity.
Which of the following systems of vectors are right-handed? Which are left-handed?
\[
{\bf a} \quad {\bf k, \ i, \ j}; \qquad {\bf b} \quad
\]
Show that if a × u = 0, then a = 0.
Find the area of the parallelogram determined by the vectors (1, 2, &mnus;3) and (2, −1, 2).
Find the area of the parallelogram determined by the vectors
Find the area of the triangle determined by the three points
Find the volume of the parallelepiped determined by the vectors
Which of the following systems of three vectors are right-handed? Which are left-
handed? Which are coplanar?
\[
{\bf a} \quad
\]
Suppose you are given three vectors whose components are all integers. Can you
conclude the volume of the parallelepiped determined from these three vectors will always be an integer?
Is u × (v × w) = (u × v) × w ? What is the meaning of u × v × w ?
Show by direct computation that
\begin{align*}
\| {\bf a} \times {\bf b} \|^2 &= \| {\bf a} \|^2 \| {\bf b} \|^2 - \left(
{\bf a} \bullet {\bf b} \right)^2
\\
&= \| {\bf a} \|^2 \| {\bf b} \|^2 \left( 1 - \cos^2 \theta \right) ,
\end{align*}
where θ is the angle included between the two vectors.