
Introduction to Linear Algebra
Systems of Linear Equations
- Introduction
- Linear systems
- Vectors
- Linear combinations
- Matrices
- Planes in ℝ³
- Equation A x = b
- Sensitivity of solutions
- Linear independence
- Plane transformations
- Space transformations
- Linear transformations
- Affine maps
- Exercises
- Answers
Matrix Algebra
- Introduction
- Manipulation of matrices
- Partitioned matrices
- Block matrices
- Matrix operators
- Determinants
- Cofactors
- Cramer's rule
- Chiò's method
- Equivalent matrices
- Elimination: A = L U
- PLU factorization
- Reflection
- Givens rotation
- Special matrices
- Exercises
- Answers
Vector Spaces
- Introduction
- Motivation
- Vector spaces
- Bases
- Dimension
- Coordinate systems
- Linear transformations
- Change of basis
- Matrix transformations
- Compositions
- Isomorphisms
- Dual transformations
- Quotient spaces
- Rank
- Solving A x = b
- Exercises
- Answers
Eigenvalues, Eigenvectors
- Introduction
- Characteristic polynomials
- Companion matrix
- Algebraic and geometric multiplicities
- Minimal polynomials
- Eigenspaces
- Where are eigenvalues?
- Eigenvalues of A B and B A
- Generalized eigenvectors
- Similarity
- Diagonalizability
- Self-adjoint operators
- Exercises
- Answers
Euclidean Spaces
- Introduction
- Euclidean space
- Bilinear transformations
- Norm and distance
- Matrix norms
- Dual norms
- Dual transformations
- Examples of transformations
- Orthogonality
- Gram--Schmidt Process
- Orthogonal matrices
- Self-adjoint matrices
- Unitary matrices
- Projection operators
- QR-decomposition
- Least Square Approximation
- Quadratic forms
- Exercises
- Answers
Canonical forms
- Introduction
- 2D decomposition
- 3D decomposition
- Projectors
- Direct-sum decompositions
- Cyclic decompositions
- Symmetric matrices
- Pseudoinverse
- URV-decomposition
- LU-decomposition
- QR-decomposition
- Cholesky decomposition
- Schur decomposition
- Positive matrices
- Roots
- Polar factorization
- Spectral decomposition
- CUR decomposition
- Exercises
- Answers
Applications
- Introduction
- Circles along curves
- TNB frames
- GPS problem
- Coriolis acceleration
- Poisson equation
- Graph theory
- Error correcting codes
- Electric circuits
- FSA
- Markov chains
- Cryptography
- Wave-length transfer matrix
- Computer graphics
- Linear Programming
- Hill's determinant
- Fibonacci matrices
- Discrete dynamic systems
- Discrete Fourier transform
- Fast Fourier transform
- Curve fitting
- Answers
Miscellany
- Introduction
- Circles along curves
- TNB frames
- Differential forms
- Calculus
- Vector representations
- Matrix representations
- Change of basis
- Orthonormal Diagonalization
- Generalized inverse
- Differential forms
Preliminaries
- Complex Number Operations
- Sets
- Polynomials
- Polynomials and Matrices
- Computer solves Systems of Linear Equations
- Location of Eigenvalues
- Power Method
- Iterative Method
- Similarity and Diagonalization
Glossary
Reference

This Book is licensed under Creative Commons Attribution-NonCommercial-NoDerivs 3.0 Unported License
Motivation
Quantities that completely specified by single data, like length, density, or mass, are called scalars. In this tutorial, we consider only scalars that are elements of three fields: ℚ (rational numbers), ℝ (real numbers), or ℂ (complex numbers). Quantities that are not scalars, but that can be added and multiplied by scalas are referred to as vectors.The concept of a vector in its earliest manifestation comes from physical considerations. In particular, there is evidence of velocity being thought as a vector---a quantity with direction and magnitude---in ancient Greek times. For instance, the treatise Mechanice by an unknown author in the fourth century B.C. is written: "When a body is moved in a certain ratio (i.e., has two linear movements in a constant fraction of one to another) the body must move in a straight line, and this straight line is the diagonal of the parallelogram formed from the straight lines which have the given ratio." Heron of Alexandria (first century A.D.) gave a proof of this result when the directions were perpendicular. He showed that if a point P moves with a constant velocity over a line PQ while at the same time the line PQ moves with constant velocity along the parallel lines PR and QS so that it always remains parallel to its original position, and that if the time P takes to reach Q is the same as the time PQ takes to reach RS, then in fact the point P moves along the diagonal PS.
This basic idea of adding two motions vectorially was generalized from velocities to physical forces in the sixteenth and seventeenth centuries. One example of this practice is found the Law of Motion in Isaac Newton's Principia, where he shows that "a body acted on by two forces simultaneously will describe the diagonal of a parallelogram in the same time as it would describe the sides by those forces separately."
Before invention of rectangular coordinates in 1637 by the French philosopher, scientist, and mathematician René Descartes (1596--1650) (Latinized name: Cartesius), geometrical prospective dominated (including name "vector"). Since 85% of information comes to humans through eyes, developing a geometric intuition cannot be ignored.
Physicists have found a very useful geometric interpretation of forces acting on a body. The motion in response to a force depends on the direction in which the force is applied and on the magnitude of the force---that is, on how hard the force is exerted. It is natural to represent a force by an arrow, pointing in the direction in which the force is acting, and with the length of the arrow representing the magnitude of the force. Such an arrow is a force vector. In short, a vector is a term that refers colloquially to some quantities that cannot be expressed by a single number, but can be fully characterized by its magnitude and direction.
It leads naturally to describe a vector as an arrow. However, this geometrical approach has a serious limitation of being applied to quantities in low dimensions (up to three). So we need an algebraic description rather than geometrical one because computers accept only the former.
 |
vec = Graphics[{Arrowheads[0.1], {Thick, Blue,
Arrow[{{0, 0}, {2, 1}}]}}];
vec = Graphics[{Arrowheads[0.1], {Thick, Blue, Arrow[{{0, 0}, {2, 1}}]}}]; vec3 = Graphics[{Arrowheads[0.1], {Thick, Black, Arrow[{{0, -1}, {2, 0}}]}}]; Show[vec, vec2, vec3] |
t0 = Graphics[ Text[Style["Initial point", FontSize -> Scaled[0.05]], {0.5, -0.06}]];
t1 = Graphics[ Text[Style["Terminal point", FontSize -> Scaled[0.05]], {3.06, 1.2}]];
d0 = Graphics[{Magenta, Disk[{0.01, 0}, 0.05]}];
d1 = Graphics[{Red, Disk[{3.03, 1.01}, 0.06]}];
Show[vec, d0, d1, t0, t1]
In applications, people deal with a variety of quantities that are used to describe the physical world. Examples of such quantities include distance, displacement, speed, velocity, acceleration, force, mass, momentum, energy, work, power, etc. All these quantities can by divided into two categories -- vectors and scalars.
---> The Cartesian coordinate system provides a natural generalization of vectors to higher dimensions independently of their geometrical interpretation of having magnitude and direction.
Using a rectangular coordinate system in the plane, note that if we consider a force vector to start from the origin (0, 0), then the vector is completely determined by the coordinates of the point at the tip of the arrow. Hence, we can consider each ordered pair in ℝ×ℝ to represent a vector in the plane as well as a point in the plane. When we wish to regard an ordered pair as a vector, we will use square brackets, rather than parentheses, to indicate this. Also, we often will write vectors as columns of numbers rather than as rows, and brackets notation is traditional for columns. Thus, we speak of the point (2, 1) in ℝ×ℝ and of the vector [2, 1] in ℝ₂ or vector \( \displaystyle \begin{bmatrix} 2 \\ 1 \end{bmatrix} \) in ℝ². To represent the point (2, 1) in the plane, we make a dot at the appropriate place, whereas if we wish to represent the vector [2, 1], we draw an arrow emanating from the origin with its tip at the place where we would plot the point (2, 1). Mathematically, there is no distinction between (2, 1) and [2, 1]. The different notation merely indicate different views of the same member of ℝ².
It is a custom to visualize vectors with arrows (geometric object on the plane or 3D space). The tail of the arrow is called the initial point of the vector and the tip the terminal point. To emphasis this approach, an arrow is placed above the initial and terminal points, for example, the notation \( {\bf v} = \vec{AB} \) tells us that A is the starting point of the vector v and its terminal point is B. In this tutorial (as in most science papers and textbooks), we will denote vectors in boldface type applied to lower case letters such as v, u, or x.
Practical life requires quantitative description of physical phenomena. For instance, saying that today is cold and windy does not provide enough information what kind of dressing is needed. So you need units for temperature and starting point, which is usually referred to as the origin. The general approach was accomplished with
One-dimensional Vector Space
A line with a chosen Cartesian system is called a number line, denoted by ℝ in mathematics. Every real number has a unique location on the line. Conversely, every point on the line can be interpreted as a number in an ordered continuum such as the real numbers.
ar1 = Graphics[{Red, Thickness[0.01], Arrowheads[0.06], Arrow[{{0.1, 0}, {0.5, 0}}]}];
d = Graphics[{Magenta, Disk[{0.1, 0}, 0.01]}];
t0 = Graphics[ Text[Style["O", FontSize -> Scaled[0.05]], {0.1, -0.05}]];
t1 = Graphics[ Text[Style["1", FontSize -> Scaled[0.05]], {0.49, -0.05}]];
Show[ar, ar1, d, t0, t1]

Let us consider a couple of motivated examples.
On a line, we choose a starting point that we call the origin and with some unit length we can identity energy or temperature values. Similar approach is valid in other physical problems.
In electric circuit, we can only measure voltage differences, not voltages themselves. The reason is that we can add any real number to our definition of the electromagnetic potential without changing any of the physics. In practical work with electrical circuits, we usually say the electromagnetic potential of the ground is zero. But this is an arbitrary choice.
Our next example is the set of real numbers ℝ that is a vector space over the set of scalars ℝ. Considering this set as a vector space, we denote it as ℝ¹. Similar conclusion is true for the field of rational numbers ℚ.
Vectors on the Plane
There has been something missing from our good times in the plane however, and what is missing is arithmetic. The notion of adding points may seem a bit odd because addition is for numbers, not points. However, addition is legitimate for vectors. Most likely, you are familiar with (free) vectors on the plane that can be moved without changing their direction and magnitude. It is a custom to identify vectors with arrows (geometric objects). The tail of the arrow is called the initial point of the vector and the tip the terminal point. To emphasis this approach, an arrow is placed above the initial and terminal points, for example, the notation \( {\bf v} = \vec{AB} \) tells us that A is the starting point of the vector v and its terminal point is B. In this tutorial (as in most science papers and textbooks), we will denote vectors in boldface type applied to lower case letters such as v, u, or x.
Any two vectors x and y can be added in "tail-to-head" manner; that is, either x or y may be applied to any point and then another vector is applied to the endpoint of the first. If this is done, the endpoint of the latter is the endpoint of their sum, which is denoted by x + y. Besides the operation of vector addition there is another natural operation that can be performed on vectors---multiplication by a scalar that are often taken to be real numbers. When a vector is multiplied by a real number k, its magnitude is multiplied by |k| and its direction remains the same when k is positive and the opposite direction when k is negative. Such vector is denoted by kx.
These two sets, points and vectors, can be only identified with each other when a Cartesian system of coordinated is imposed on the plane. This requires choosing the origin, two perpendicular lines with orientation, and units in order to convert these lines into axes. Upon coordinization of the plane, we can identify its points (denoted geometrically by dots) with ordered pairs of numbers, known as coordinates. This allows us to establish one-to-one correspondence between these three sets: vectors, points on the plane, and ordered pairs of real numbers, denoted by ℝ².
The invention of Cartesian coordinates in 1649 by René Descartes (Latinized name: Cartesius) revolutionized mathematics by providing the first systematic link between Euclidean geometry and algebra.
With this correspondence, we can define addition between their elements of these three sets based on known rules for vectors:
Vectors can be described also algebraically. Historically, the first vectors were Euclidean vectors that can be expanded through standard basic vectors that are used as coordinates. Then any vector can be uniquely represented by a sequence of scalars called coordinates or components. The set of such ordered n-tuples is denoted by 𝔽n, where set of scalars 𝔽 is usually one of the following three fields: either set of rational numbers ℚ or set of real numbers ℝ or set of complex numbers ℂ. Motivated by these two approaches, we present the general definition of vectors.
Vectors in ℝ²
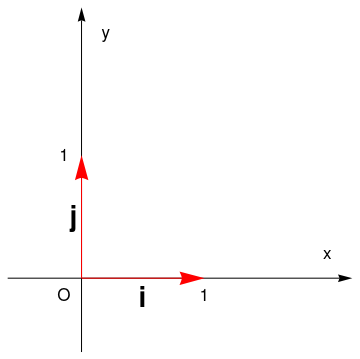
The coordinates are usually written as two numbers in parentheses, in that order, separated by a comma, as in (1, 2). Thus, the origin has coordinates (0, 0), and the points on the positive half-axes, one unit away from the origin, have coordinates (1, 0) and (0, 1). They are usually denoted by i and j, respectively.
In mathematics, physics, and engineering, the first axis is usually defined or depicted as horizontal and oriented to the right, called abscissa, and the second axis is vertical and oriented upwards; it is referred to as ordinate. (However, in some engineering problems and computer graphics contexts, the ordinate axis may be oriented downwards---navy prefers downwards.) The origin is often labeled O, and the two coordinates are often denoted by the letters X and Y, or x and y. The axes may then be referred to as the X-axis and Y-axis. The choices of letters come from the original convention, which is to use the latter part of the alphabet to indicate unknown values. The first part of the alphabet was used to designate known values.
aj = Graphics[{Red, Thickness[0.01], Arrowheads[0.07], Arrow[{{0,0}, {0,0.5}}]}];
ax = Graphics[Arrow[{{-0.3,0}, {1.1,0}}]];
ay = Graphics[Arrow[{{0,-0.3}, {0,1.1}}]];
tx = Graphics[Text[Style["x", FontSize->Scaled[0.05]], {1.0,0.1}]];
ty = Graphics[Text[Style["y", FontSize->Scaled[0.05]], {0.1,1.0}]];
ti = Graphics[Text[Style["i", Bold, FontSize->Scaled[0.08]], {0.25,-0.08}]];
tj = Graphics[ Text[Style["j", Bold, FontSize -> Scaled[0.08]], {-0.05, 0.25}]];
tx1 = Graphics[Text[Style["1", FontSize->Scaled[0.05]], {0.5,-0.07}]];
ty1 = Graphics[Text[Style["1", FontSize->Scaled[0.05]], {-0.07,0.5}]];
t0 = Graphics[Text[Style["O", FontSize->Scaled[0.05]], {-0.07,-0.07}]];
Show[ax,ay,tx,ty,ai,aj,ti,tj,tx1,ty1,t0]
 |
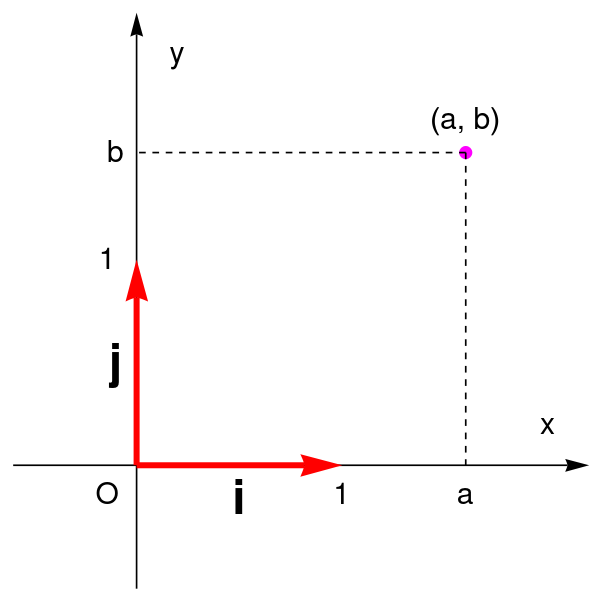 |
l1 = Graphics[{Dashed, Line[{{0.8, 0.76}, {0.8, 0}}]}];
l2 = Graphics[{Dashed, Line[{{0.8, 0.76}, {0, 0.76}}]}];
ta = Graphics[ Text[Style["a", FontSize -> Scaled[0.05]], {0.8, -0.07}]];
tb = Graphics[ Text[Style["b", FontSize -> Scaled[0.05]], {-0.05, 0.76}]];
tab = Graphics[ Text[Style["(a, b)", FontSize -> Scaled[0.05]], {0.8, 0.84}]];
Show[ax, ay, tx, ty, ai, aj, ti, tj, tx1, ty1, t0, d, l1, l2, ta, tb, tab]
Vectors in ℝ³
Alternatively, each coordinate of a point P can be taken as the distance from P to the hyperplane defined by the other two axes, with the sign determined by the orientation of the corresponding axis. Each pair of axes defines a coordinate hyperplane. These hyperplanes divide space into eight octants.
In 1666, Sir Isaac Newton discovered that when a beam of sunlight passes through a glass prism, the emerging beam of light is not white but consists instead of continuous spectrum of colors ranging from violet at one end to red at the other. The color spectrum may be divided into six broad regions: violet, blue, green, yellow, orange, and red. When viewed in full color, no color in the spectrum ends abruptly, but rather each color blends smoothly into the next.
Characterization of light is central to the science of color. Chromatic light spans the electromagnetic spectrum from approximately 400 to 700 nm. Three basic quantities are used to describe the quantity of a chromatic light source: radiance, luminance, and brightness. Radiance is the total amount of energy that flows from the light source and it is usually measured in watt (W). Luminance, measured in lumens (lm), gives a measure of the amount of energy an observer perceives from alight source. Finally, brightness is a subjective descriptor that is practically impossible to measure. It embodies the achromatic (void of color) notion of intensity and is one of the key factors in the describing color sensation.
Due to absorption characteristics of the human eye, colors are seen as variable combinations of the so-called primary colors red (R), green (G), and blue (B). For the purpose of standardization, the CIE (Commission Internationale de l'Eclairage---the International Commission on Illumination) designated in 1931 the following specific wavelength values to the three primary colors: blue = 435.8 nm, green = 546.1 nm, and red = 700 nm.
Contemporal laptops, computer screens, and TV utilize "flat panel" digital technologies , such as liquid crystal displays (LCDs) and plasma devices. The amounts of red, green, and blue needed to form any particular color are called the tristimulus values, and are denoted, R, G, and B, respectively; they varies from 0 to 2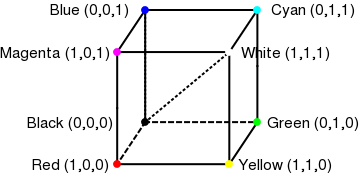
General Case
Any two vectors x and y can be added in "tail-to-head" manner; that is, either x or y may be applied to any point and then another vector is applied to the endpoint of the first. If this is done, the endpoint of the latter is the endpoint of their sum, which is denoted by x + y. Besides the operation of vector addition there is another natural operation that can be performed on vectors---multiplication by a scalar that are often taken to be real numbers. When a vector is multiplied by a real number k, its magnitude is multiplied by |k| and its direction remains the same when k is positive and the opposite direction when k is negative. Such vector is denoted by kx.
1. The first operation is an inner operation that assigns to any two vectors x and y a third vector which is commonly written as x + y and called the sum of these two vectors.
2. The second operation, is an outer operation that assigns to any scalar k and vector x another vector, denoted by kx.
- Associativity of addition: \( ({\bf v} + {\bf u}) + {\bf w} = {\bf v} + ({\bf u} + {\bf w}) \) for \( ({\bf v} , {\bf u}) , {\bf w} \in V . \)
- Commutativity of addition: \( ({\bf v} + {\bf u}) = {\bf u} + {\bf v} \) for \( ({\bf v} , {\bf u}) \in V . \)
- Identity element of addition: there exists an element \( ({\bf 0} \in V , \) called the zero vector, such that \( {\bf v} +{\bf 0}) = {\bf v} \) for every vector from V.
- Inverse elements of addition: for every vector v, there exists an element \( -{\bf v} \in V , \) called the additive inverse of v, such that \( {\bf v} + (-{\bf v}) = {\bf 0} . \)
- Compatibility of scalar multiplication with field multiplication: \( a(b{\bf v}) = (ab){\bf v} \) for any scalars a and b and arbitrary vector v.
- Identity element of scalar multiplication: \( 1{\bf v} = {\bf v} , \) where 1 denotes the multiplicative identity.
- Distributivity of scalar multiplication with respect to vector addition: \( k\left( {\bf v} + {\bf u}\right) = k{\bf v} + k{\bf u} \) for any scalar k and arbitrary vectors v and u.
- Distributivity of scalar multiplication with respect to field addition: \( \left( a+b \right) {\bf v} = a\,{\bf v} + b\,{\bf v} \) for any two scalars a and b and arbitrary vector v. ■
Addition of vectors
For two given vectors a and b, their sum a+b is determined as follows. We translate the vector b until its tail coincides with the head of a. (Recall such translation does not change a vector.) Then, the directed line segment from the tail of a to the head of b is the vector a+b.


-
a + b = b + a (commutative law);

Commutative law - (a + b) + c = a + (b + c) (associative law);
- There is a vector 0 such that b + 0 = b (additive identity);
- For any vector a, there is a vector −a such that a + (−a) = 0 (Additive inverse).
Scalar multiplication
Given a vector a and a real number (scalar) λ, we can form the vector λa as follows. If λ is positive, then λa is the vector whose direction is the same as the direction of a and whose length is λ times the length of a. In this case, multiplication by λ simply stretches (if λ>1) or compresses (if 0<λ<1) the vector a. If, on the other hand, λ is negative, then we have to take the opposite of a before stretching or compressing it. In other words, the vector λa points in the opposite direction of a, and the length of λa is |λ| times the length of a. No matter the sign of λ, we observe that the magnitude of λa is |λ| times the magnitude of a: ∥λa∥ = |λ| ∥a∥. Scalar multiplications satisfies many of the same properties as the usual multiplication.- λ(a + b) = λa + λb (distributive law, for vectors)
- (λ + β)a = λa + βb (distributive law for scalars);
- 1·a = a;
- (−1)·a = −a;
- 0·a = 0.
Generalizing well-known examples of vectors (velocity and force) in physics and engineering, mathematicians introduced abstract object called vectors. So vectors are objects that can be added/subtracted and multiplied by scalars. These two operations (internal addition and external scalar multiplication) are assumed to satisfy natural conditions described above. A set of vectors is said to form a vector space (also called a linear space), if any vectors from it can be added/subtracted and multiplied by scalars, subject to regular properties of addition and multiplication. Wind, for example, has both a speed and a direction and, hence, is conveniently expressed as a vector. The same can be said of moving objects, momentum, forces, electromagnetic fields, and weight. (Weight is the force produced by the acceleration of gravity acting on a mass.)
The first thing we need to know is how to define a vector so it will be clear to everyone. Today more than ever, information technologies are an integral part of our everyday lives. That is why we need a tool to model vectors on computers. One of the common ways to do this is to introduce a system of coordinates, either Cartesian or any other. In engineering, we traditionally use the Cartesian coordinate system that specifies any point with a string of digits. Each coordinate measures a distance from a point to its perpendicular projections onto the mutually perpendicular hyperplanes.
Let us start with our familiar three dimensional space in which the Cartesian coordinate system consists of an ordered triplet of lines (the axes) that go through a common point (the origin), and are pair-wise perpendicular; it also includes an orientation for each axis and a single unit of length for all three axes. Every point is assigned distances to three mutually perpendicular planes, called coordinate planes (such that the pair x and y axes define the z-plane, x and z axes define the y-plane, etc.). The reverse construction determines the point given its three coordinates. Each pair of axes defines a coordinate plane. These planes divide space into eight trihedra, called octants. The coordinates are usually written as three numbers (or algebraic formulas) surrounded by parentheses or brackets and separated by commas, as in (-2.1,0.5,7) or [-2.1,0.5,7]. Thus, the origin has coordinates (0,0,0), and the unit points on the three axes are (1,0,0), (0,1,0), and (0,0,1).
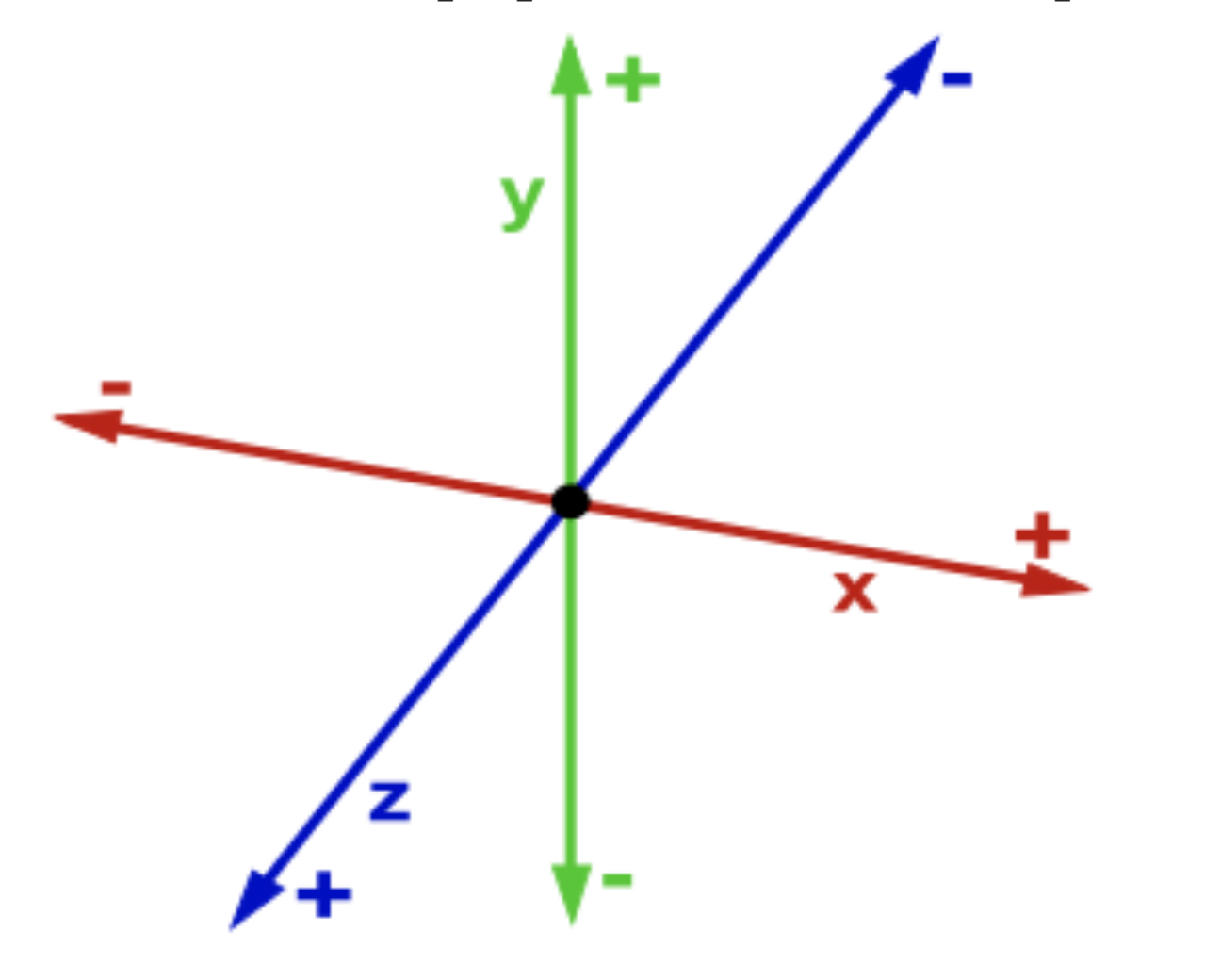
There are no universal names for the coordinates in the three axes. However, the horizontal axis is traditionally called abscissa borrowed from New Latin (short for linear abscissa, literally, "cut-off line"), and usually denoted by x. The next axis is called ordinate, which came from New Latin (linear), literally, line applied in an orderly manner; we will usually label it by y. The last axis is called applicate and usually denoted by z. Correspondingly, the unit vectors are denoted by i (abscissa), j (ordinate), and k (applicate), called the basis. Once rectangular coordinates are set up, any vector can be expanded through these unit vectors. In the three dimensional case, every vector can be expanded as \( {\bf v} = v_1 {\bf i} + v_2 {\bf j} + v_3 {\bf k} ,\) where \( v_1, v_2 , v_3 \) are called the coordinates of the vector v. Coordinates are always specified relative to an ordered basis. When a basis has been chosen, a vector can be expanded with respect to the basis vectors and it can be identified with an ordered n-tuple of n real (or complex) numbers or coordinates. The set of all real (or complex) ordered numbers is denoted by ℝn (or ℂn). In general, a vector in infinite dimensional space is identified by an infinite sequence of numbers. Finite dimensional coordinate vectors can be represented by either a column vector (which is usually the case) or a row vector. We will denote column-vectors by lower case letters in bold font, and row-vectors by lower case letters with a superimposed arrow. Because of the way the Wolfram Language uses lists to represent vectors, Mathematica does not distinguish column vectors from row vectors, unless the user specifies which one is defined. One can define vectors using Mathematica commands: List, Table, Array, or curly brackets.
In applications, people deal with a variety of quantities that are used to describe the physical world. Examples of such quantities include distance, displacement, speed, velocity, acceleration, force, mass, momentum, energy, work, power, etc. All these quantities can by divided into two categories -- vectors and scalars. A vector quantity is a quantity that is fully described by both magnitude and direction. On the other hand, a scalar quantity is a quantity that is fully described by its magnitude. In mathematics, physics, and engineering, a Euclidean vector (simply a vector) is a geometric object that has magnitude (or length) and direction. Many familiar physical notions, such as forces, velocities, and accelerations, involve both magnitude (the amount of the force, velocity, or acceleration) and a direction. In most physical situations involving vectors, only the magnitude and direction of the vector are significant; consequently, we regard vectors with the same length and direction as being equal irrespective to their positions.